SOLIDWORKS DIY打造章鱼博士机械臂:Tyler Csatari将虚构变为实用
日期:2025-10-31 发布者: 智诚科技 浏览次数:次

每年十月,大多数人都会在衣柜里翻找旧的万圣节服装。Tyler Csatari 打开一个 CAD 文件。今年,他的“服装”包括 12 个电机、定制的 3D 打印椎骨和四个在电机控制下移动的机械臂。他正在打造自己的章鱼博士版本,这是蜘蛛侠中最令人难忘的反派之一,为喜欢工程角色扮演的制作者提供了雄心勃勃的服装创意。
在超级英雄的虚构世界里,章鱼博士的机械臂凭借强大的力量与灵活的操控,成为最具标志性的装备之一。而对于设计师泰勒・卡萨塔里(Tyler Csatari)来说,这种 “虚构装备” 并非只能存在于银幕 —— 他借助 SOLIDWORKS 工具,将幻想中的机械结构转化为了可实际运作的功能性原型机,让 “从虚构到实用” 的创意落地。
泰勒从小就是超级英雄题材的爱好者,章鱼博士的多臂设计一直让他着迷。“那些机械臂不仅视觉冲击力强,更蕴含着工程学的潜力 —— 多自由度操控、负重能力与精准协作,这些特性在现实场景中同样有应用价值。” 他说道。带着这份好奇,泰勒决定启动 “Doc Ock 机械臂项目”,目标是打造一套兼顾还原度与实用性的机械臂系统。
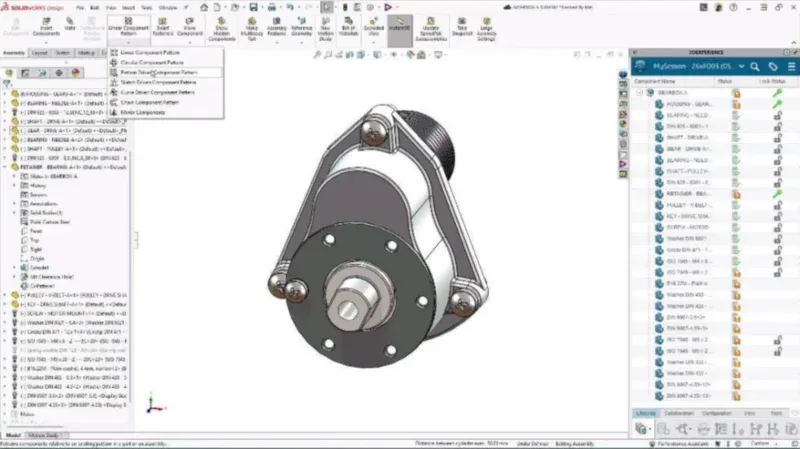
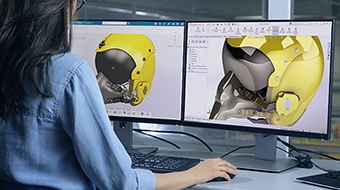
项目初期,最大的挑战在于平衡 “虚构还原” 与 “工程可行性”。章鱼博士的机械臂在漫画中造型夸张,若完全照搬,会导致结构不稳定、动力不足等问题。泰勒借助 SOLIDWORKS 3D 建模功能,先搭建了虚构造型的数字模型,再通过运动仿真工具测试各关节的活动范围。他发现,原设定中部分关节角度会导致机械干涉,于是通过调整连杆长度、优化关节结构,在保留核心造型的同时,确保了运动流畅性。


动力系统的设计是另一大关键。泰勒希望机械臂能实现自主操控,而非单纯的手动控制。他选用了小型伺服电机作为执行器,并通过 SOLIDWORKS Simulation 进行负载分析 —— 模拟机械臂在抓取不同重量物体时的受力情况,避免电机过载或结构变形。“SOLIDWORKS 的仿真工具让我不用反复制作物理原型,就能预判问题。比如最初选用的电机功率不足,通过仿真数据调整后,机械臂的负重能力提升了 30%。” 泰勒分享道。
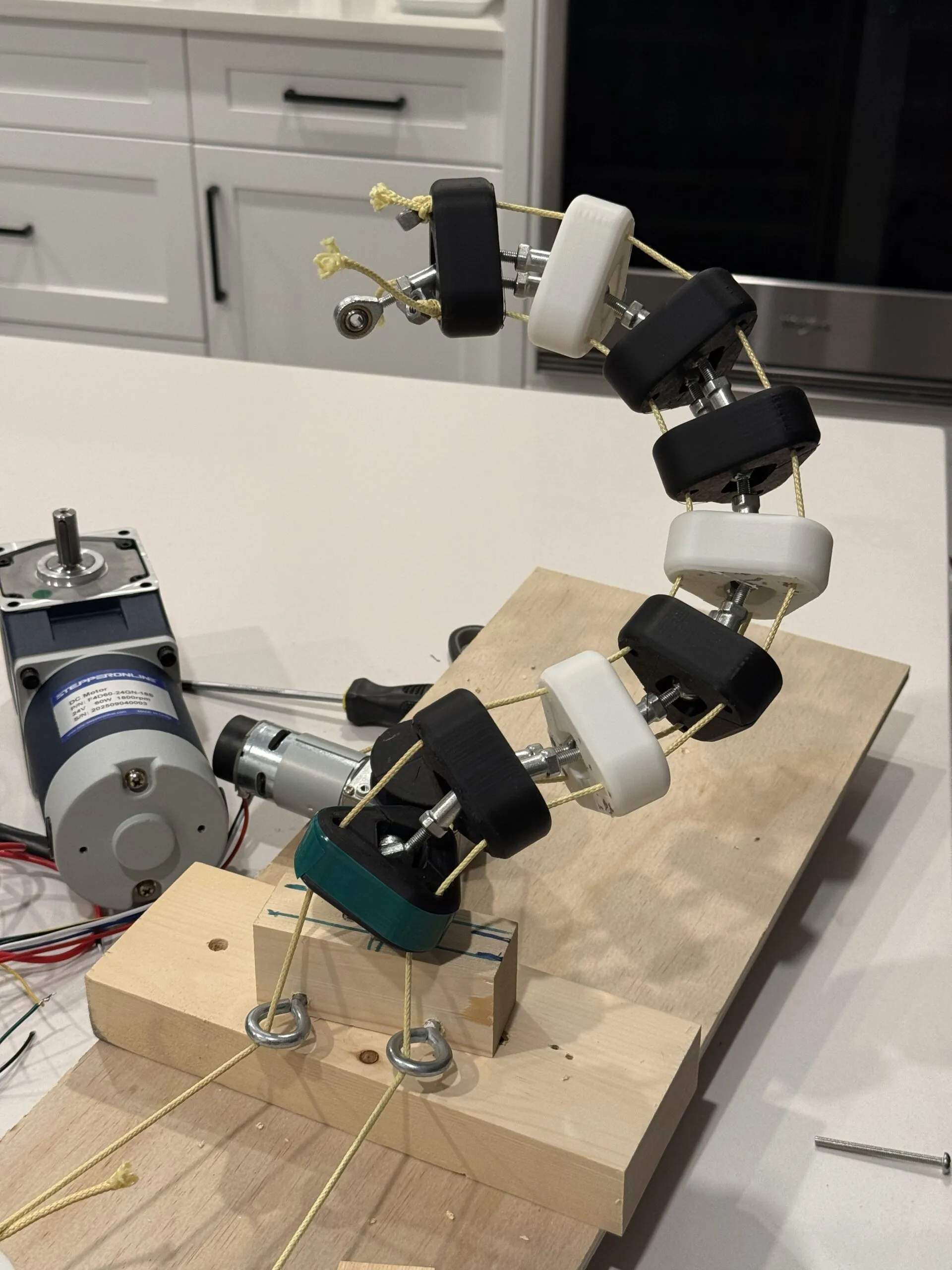
装配环节同样离不开数字化工具的支持。这套机械臂包含近 200 个零部件,从连杆、关节轴承到电机支架,每个零件的尺寸精度都直接影响整体性能。泰勒利用 SOLIDWORKS 的装配体功能,进行虚拟装配与公差分析,提前排查零件干涉问题。“传统方式下,零件加工后才发现不匹配是常有的事,但虚拟装配让我在生产前就解决了 90% 的适配问题,大大节省了时间和成本。”


经过 6 个月的迭代优化,泰勒的章鱼博士机械臂原型机最终完成。这套机械臂拥有 6 个自由度,可实现 360 度旋转、伸缩与抓取动作,能负重 5 公斤,同时保留了漫画中标志性的 “多臂协同” 特性。通过蓝牙连接手机 APP,用户可精准控制每个机械臂的运动轨迹,既可以用于 cosplay 展示,也能完成简单的物品搬运、工具辅助等实用场景。
“从创意萌芽到原型落地,SOLIDWORKS 是贯穿始终的核心工具。它让我不用纠结于复杂的工程计算,能更专注于‘如何让虚构创意变得实用’。” 泰勒表示,接下来他计划进一步优化机械臂的轻量化设计,并探索在工业辅助、康复设备等领域的应用可能。“虚构作品往往是创意的源泉,而工程工具则是将创意落地的桥梁 —— 只要找对方法,幻想也能成为改变现实的力量。”
如今,泰勒的 Doc Ock 机械臂项目已在社交平台引发广泛关注,不少爱好者通过他分享的设计思路,尝试复刻或改良方案。而对于泰勒而言,这个项目的意义不仅在于打造了一件原型机,更在于证明了:创意不分虚实,只要借助合适的工具,再大胆的幻想都能转化为触手可及的实用产品。
了解有关 SOLIDWORKS for Maker 的更多信息可联系代理商智诚科技ICT,电话:400-886-6353,可以开始构建您自己的原创 DIY 角色扮演作品。
部分文章来源网络或用户投稿,如有侵权请联系本站删除!
获取SW正版免费试用,有任何疑问咨询热线:400-886-6353或 联系在线客服
未解决你的问题?请到「问答社区」反馈你遇到的问题,专业工程师为您解答!
- 相关内容
- 推荐产品
-
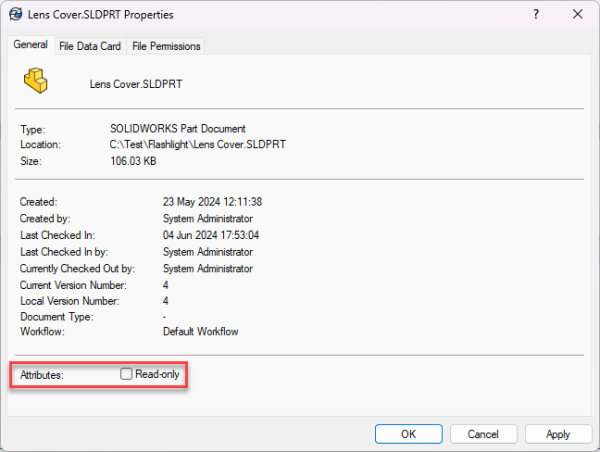
如何关闭 SOLIDWORKS PDM 的检出提示
-
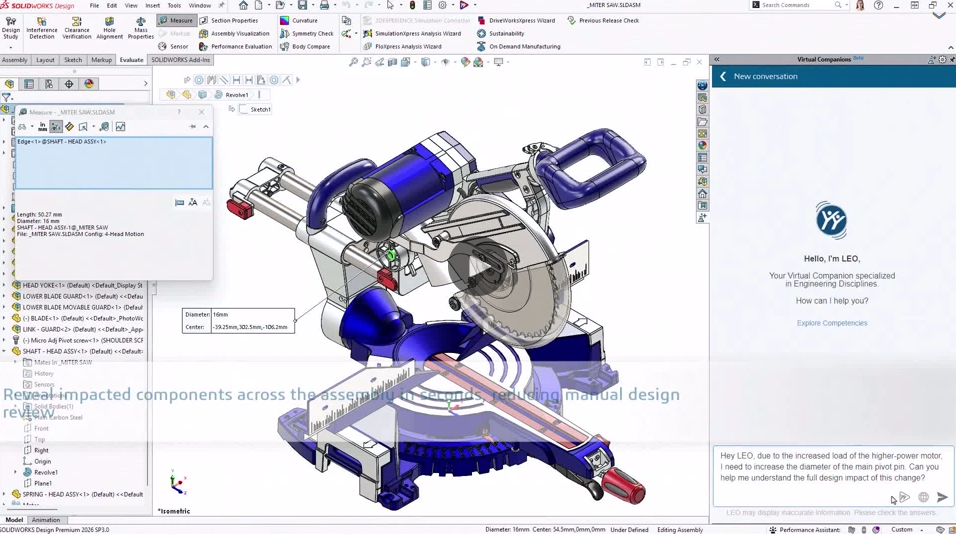
SOLIDWORKS AI助手 LEO实操:装配变更全依赖追溯、批量自定义属性自动化方案
-
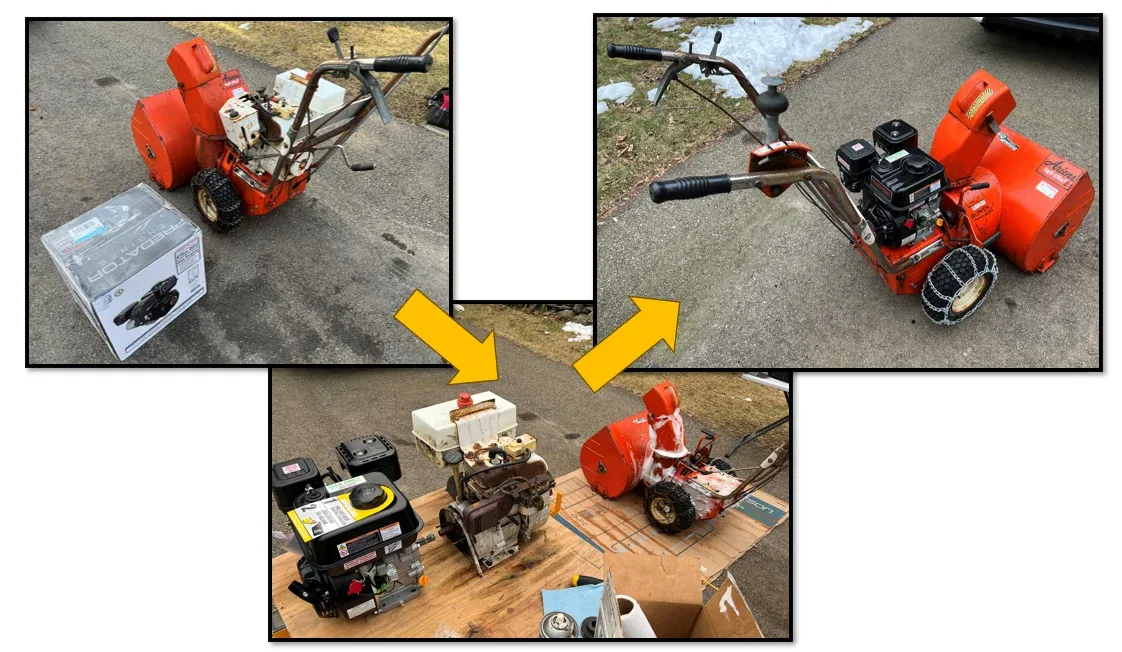
SOLIDWORKS创客版实战案例:草坪割草机随行踏板加大轮径全套结构改造设计

-
SOLIDWORKS 实用 3D 打印件设计指南
-
SOLIDWORKS 2026x FD03 新版本 —— 设计与建模功能更新
-
SOLIDWORKS 2026x FD03 新功能 —— 协同与数据管理模块
-
 SOLIDWORKS Manage
SOLIDWORKS Manage
产品 -
 CircuitWorks for SOLIDWORKS
CircuitWorks for SOLIDWORKS
产品 -
 SOLIDWORKS 3D CAD
SOLIDWORKS 3D CAD
产品 -
 3DEXPERIENCE SOLIDWORKS
3DEXPERIENCE SOLIDWORKS
产品 -
 SOLIDWORKS Simulation
SOLIDWORKS Simulation
产品 -
 SOLIDWORKS Plastics
SOLIDWORKS Plastics
产品
 SOLIDWORKS多功能插件ICTbox
SOLIDWORKS多功能插件ICTbox 
智诚科技工业服务项目承接
智诚科技ICT专注机械设计、仿真分析、电气开发、PLM实施、二次开发,专业工程师团队外包落地,助力企业降本增效