工业机器人与数控加工(CNC):借助 DELMIA实现技术融合
日期:2026-04-07 发布者: Robert Molls 浏览次数:次
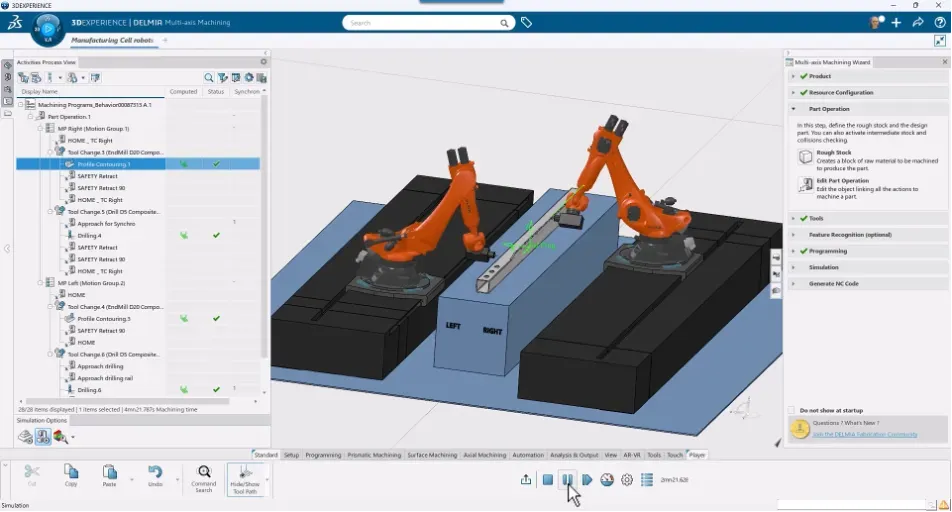
本文将为你详细讲解如何通过 DELMIA Machining(DELMIA 加工模块),为搭载发那科控制器、运行固定工具中心点模式的工业机器人进行编程。同时带你探索 DELMIA 如何打通数控加工设备与工业机器人的技术壁垒,为数控编程工程师提供一款操作熟悉、功能强大的工具,进一步挖掘加工工艺的潜力。

DELMIA 全系列产品如何赋能机器人与制造业的未来发展
即便是在以数控加工设备为主导的生产工厂中,工业机器人的应用也愈发广泛。如今,我们有必要深入了解 DELMIA 的全系列产品,探究其中哪些模块可实现机器人编程,以及各模块之间的差异。
显然,DELMIA Robotics(DELMIA 机器人模块) 是首选,该模块可完成工业机器人在传统应用场景中的编程工作,例如上下料、焊接、喷涂以及装配等工序。而稍显意外的是,DELMIA Machining(DELMIA 加工模块) 同样具备机器人编程能力,它并非是 DELMIA Robotics 在上述传统场景中的替代方案,而是作为补充模块,为机器人应用开辟全新可能。原因在于,DELMIA Robotics 并不具备 DELMIA Machining 那般先进的加工轨迹生成能力,无法满足高精度的加工工艺需求。
得益于 DELMIA 各产品研发团队之间的技术互通,研发人员对 DELMIA Machining 进行了功能升级,使其不仅能为数控加工设备编程,还可实现工业机器人的编程操作,就此弥补了二者在加工编程领域的技术差距。
在 DELMIA 的产品矩阵中,DELMIA Virtual Commissioning(DELMIA 虚拟调试模块) 同样不可或缺。该模块可将 DELMIA 软件与虚拟机器人控制器相连接,实现机器人运动行为的精准仿真,让工程师能在程序投入车间实际生产前,完成程序的调试与优化工作。
如何在保持生产灵活性的同时提升生产效率
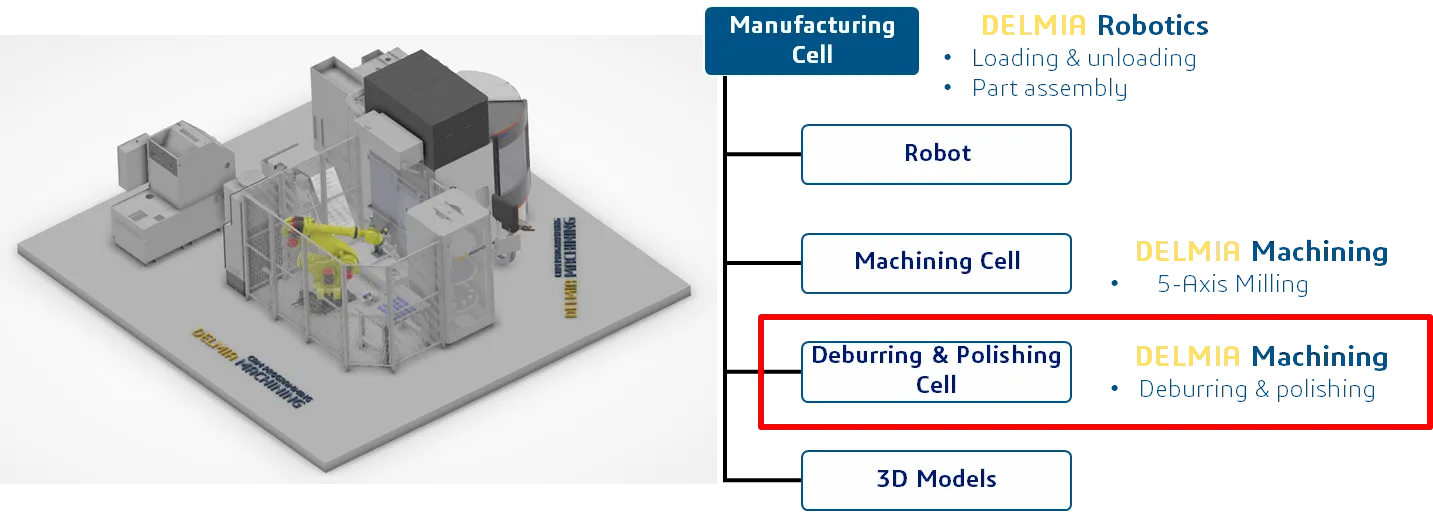
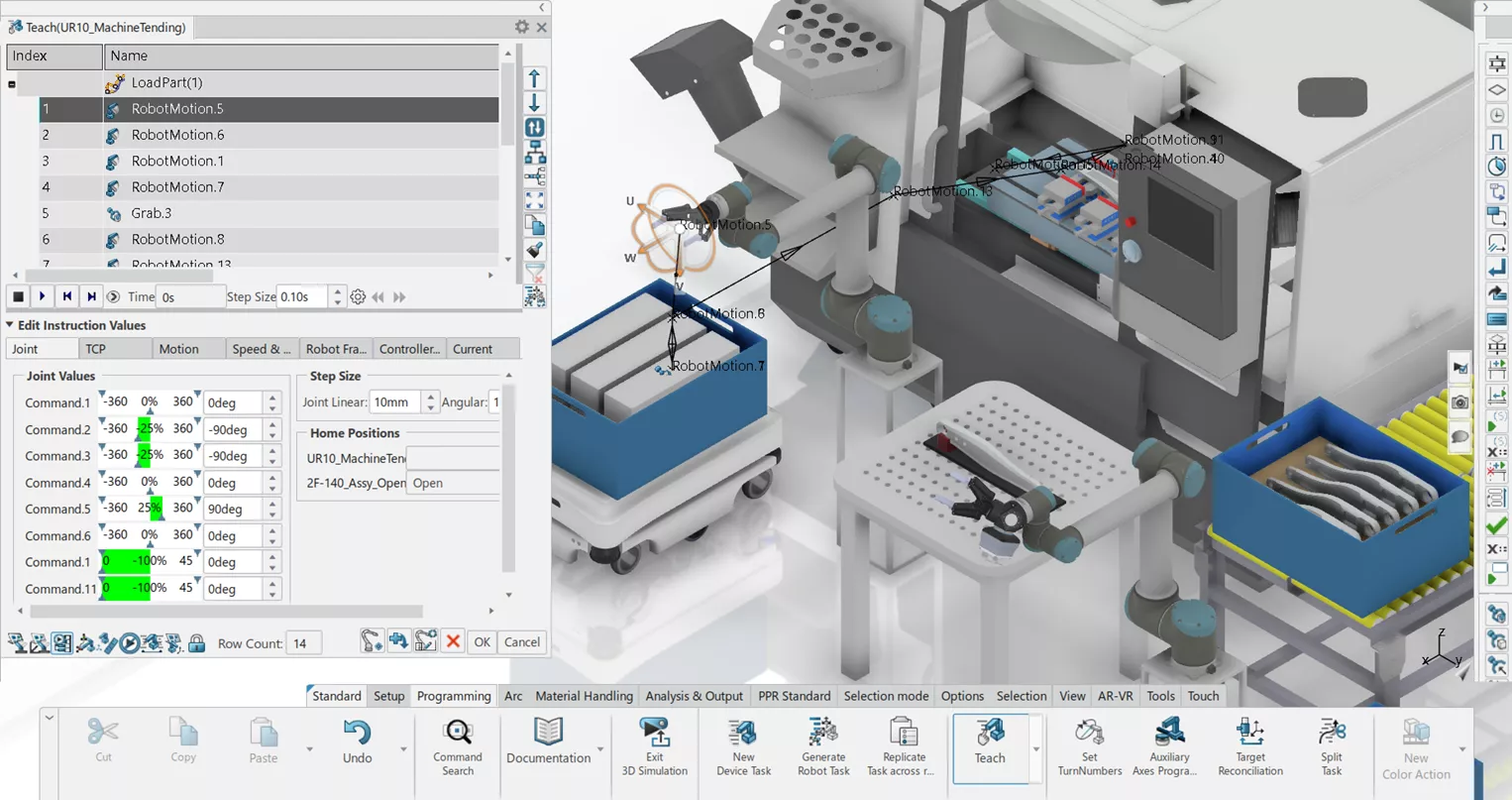
2025 年,在瑞士国际工业技术展(Innoteq)上,达索系统展示了如何将 DELMIA Robotics、DELMIA Machining 与 DELMIA Virtual Commissioning 三大模块相结合,搭建一套全自动化生产单元,实现生产效率提升与生产灵活性保持的双重目标。
该自动化生产单元由 GF 五轴加工中心、发那科工业机器人、零件仓储区、装配工作站以及两台用于去毛刺和抛光加工的主轴设备组成。在该生产单元的规划、仿真与落地实施全流程中,上述三款 DELMIA 模块均发挥了关键作用:
在规划阶段,工程师通过 DELMIA Robotics 验证产线布局的合理性,确保机器人的作业范围可覆盖所有工作站,同时完成装配工序与上下料工序的机器人编程;
针对对加工轨迹精度要求较高的工序 —— 即去毛刺和抛光加工,采用 DELMIA Machining 进行编程;
借助 DELMIA Virtual Commissioning,工程师在程序下发至实际机器人运行前,完成了机器人程序的调试、优化与有效性验证。
精通机器人加工:固定工具中心点模式简易操作指南
DELMIA Machining 让数控编程工程师无需适配新的软件,即可同时使用工业机器人与数控加工设备完成各类加工工序。但工业机器人与数控加工设备的运行逻辑存在本质差异,这一特点也在 DELMIA Machining 的操作设置中有所体现。
本文将以实操教程的形式,讲解如何通过 DELMIA Machining 为搭载发那科控制器、运行固定工具中心点模式的机器人编程。固定工具中心点(TCP) 指的是在机器人作业单元中预设的一个固定空间点位,编程时会设定刀具刀尖回归该点位,或与该点位产生作业交互。通过本教程,你将了解 DELMIA 如何打通数控加工设备与工业机器人的技术壁垒,为数控编程工程师提供一款操作熟悉、功能强大的工具,进一步拓展加工工艺的应用边界。
应用场景介绍
本教程的应用场景源于 2025 年瑞士国际工业技术展的现场展示方案,该方案融合了 DELMIA Machining、DELMIA Robotics 与 DELMIA Virtual Commissioning 三大模块,搭建了一套全自动化生产单元。本教程的讲解范围将限定在去毛刺与抛光加工工序的机器人编程操作。
核心工作流程
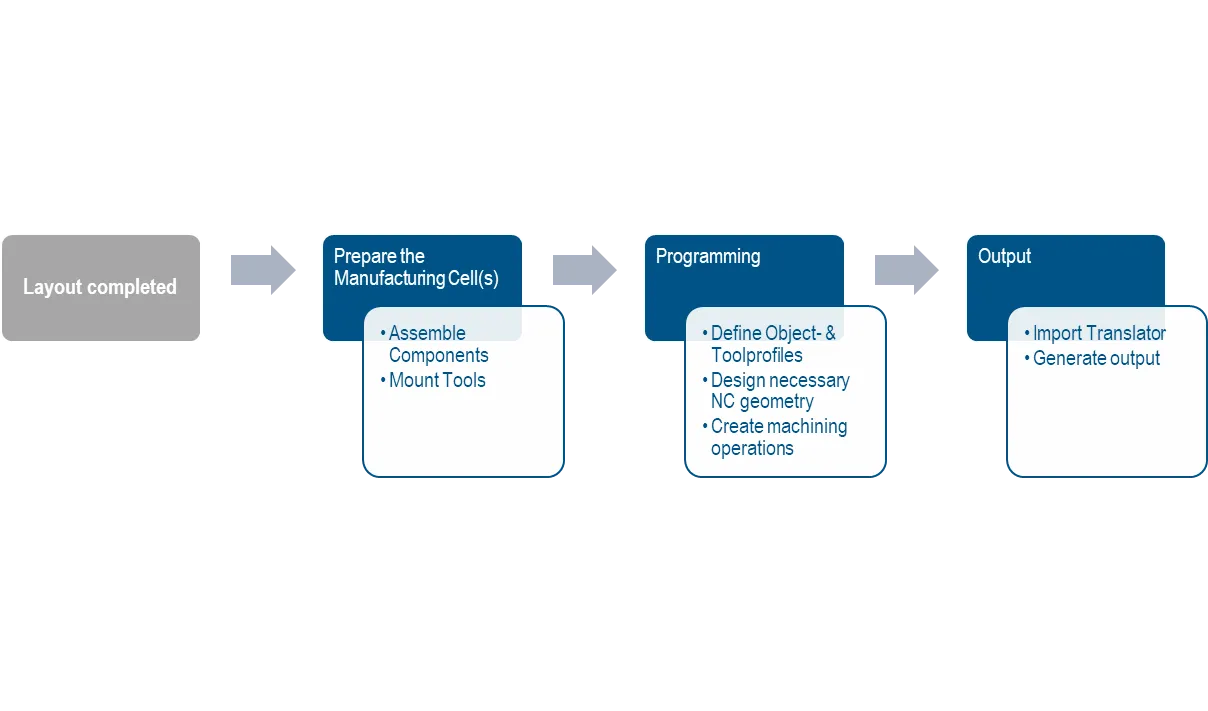
本次实操的核心工作流程分为三大阶段:生产单元准备、程序编制、程序输出,各阶段核心操作如下:
生产单元准备:完成产线布局规划、装配各工作站组件、安装加工刀具、定义工件与刀具轮廓、设计加工所需的数控几何模型;
程序编制:导入程序转换器、创建加工工序、编写机器人加工指令与后置处理注释;
程序输出:生成适配机器人控制器的程序文件。
关键信息说明
本次实操的整个项目方案都归集在一个主生产单元(顶层节点)中,该主生产单元下包含两个可独立运行的子生产单元。这种架构设计可让不同工程师同时负责三个生产单元的相关工作,大幅提升项目推进效率。
为确保各生产单元内各类设备与工件的定位保持一致,所有生产单元共享一个基准布局零件。该零件中包含了定义生产单元内所有对象位置的坐标系,工程师在规划主生产单元的产线布局时,会先完成该基准布局零件的定义,后续搭建去毛刺与抛光加工子生产单元时,可直接复用该零件。
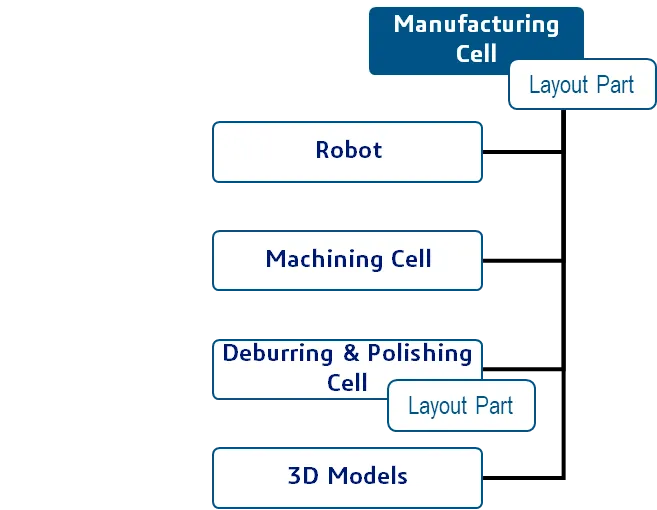
搭建生产单元布局
借助基准布局零件,将去毛刺与抛光加工所需的相关组件,按照其在主生产单元中的位置进行精准布置。
本场景中需要布置的组件为去毛刺 / 抛光主轴设备与用于碰撞检测的机床床身,由于主轴设备与加工中心的安装位置距离较近,精准的布局规划是避免设备碰撞的关键。
为固定式主轴设备定义固定刀具
将加工刀具安装至前序步骤中布置完成的主轴设备上,由于该主轴设备为固定式设计,因此需将所安装的刀具定义为固定刀具。
前序步骤中已完成刀具模型的添加,本步骤的刀具定义操作,是为了确保在整个加工过程中(无换刀工序),刀具模型始终处于可视状态,便于工程师进行仿真与调试。
配置机器人加工坐标系
用于定义工件轮廓的加工坐标系,必须精准定位在生产单元的绝对原点位置。在生成程序输出文件时,软件会基于该加工坐标系,自动创建工件轮廓模型。
通过曲面遮罩限定加工作业范围
本场景的加工工件为扰流板,其中心区域是头盔与坯料的连接部位,工程师需将加工作业范围限定在该区域内。为实现这一目标,需在该区域创建一个额外的曲面,即曲面遮罩,以此限定机器人的加工轨迹范围。
编写机器人加工指令与后置处理注释
除了创建基础的加工工序外,工程师还需编写机器人加工指令,通过控制机器人运动的起始点与终止点,确保机器人的运动轨迹可预测、无偏差。
同时需添加后置处理注释(PP Comments),该注释将作为控制信号,实现主轴设备的启停操作。
生成适配固定工具中心点模式的发那科控制器程序
在 DELMIA Machining 中将控制器类型设置为机器人控制器,并选择与实际机器人搭载的发那科控制器相匹配的程序转换器;
生成程序输出文件后,检查文件中的工具坐标系与用户坐标系参数;
对于运行固定工具中心点模式的发那科控制器,上述两个坐标系必须设置为相同的索引值,这是保证机器人精准运行的关键设置。
总结
工业机器人技术与加工制造技术的融合,是制造业发展的重要里程碑,DELMIA Robotics、DELMIA Machining 与 DELMIA Virtual Commissioning 三大模块的集成应用,正是这一融合趋势的最佳体现。三者的协同作用,帮助制造企业打通了数控加工设备与工业机器人之间的技术壁垒,实现了生产效率与生产灵活性的双重提升。
在 2025 年瑞士国际工业技术展上,达索系统展示的全自动化生产单元,正是依托 DELMIA Robotics 完成产线布局规划与装配工序编程、依托 DELMIA Machining 生成高精度的加工轨迹、依托 DELMIA Virtual Commissioning 完成程序验证,最终实现了全流程的自动化与精准化。
这种创新的技术应用方案,不仅简化了制造企业的生产运营流程,更让数控编程工程师无需掌握新的软件技能,即可在数控加工与机器人加工之间无缝切换。这一技术突破,为制造业的未来发展铺平了道路,推动自动化生产与高精度加工实现深度融合、协同发展。
部分文章来源网络或用户投稿,如有侵权请联系本站删除!
获取SW正版免费试用,有任何疑问咨询热线:400-886-6353或 联系在线客服
未解决你的问题?请到「问答社区」反馈你遇到的问题,专业工程师为您解答!
- 相关内容
- 推荐产品
-
PowerFLOW超越飞行包线中心:国防工业流体仿真
-
DELMIA 2026新功能|机加工能力:机器人加工与AI编程,拓宽、加深NC落地场景
-
高空验证:PowerFLOW 如何赢得航空航天与国防工业的信赖
-
Formlabs 3D打印刚性10K树脂是工业零件可靠性的起点
-
基于 3DEXPERIENCE ROBOTICS 实现机器人离线编程
-
SOLIDWORKS Composer 工业动画制作零基础教程
 SOLIDWORKS多功能插件ICTbox
SOLIDWORKS多功能插件ICTbox 
智诚科技工业服务项目承接
智诚科技ICT专注机械设计、仿真分析、电气开发、PLM实施、二次开发,专业工程师团队外包落地,助力企业降本增效