达索系统 DELMIA 2026新功能直通车|定义未来智造新范式!
日期:2026-06-12 发布者: 达索系统3DS 浏览次数:次
随着全球制造业进入智能化、柔性化与绿色化发展的新阶段,数字化制造平台已经从单纯的工艺规划工具,逐步演变为贯穿产品设计、制造规划、生产执行、质量控制以及运营优化的核心基础设施。达索系统(Dassault Systèmes)近日发布了备受期待的DELMIA R2026x版本。作为达索系统3DEXPERIENCE平台的重要组成部分,DELMIA在2026x FD01和FD02版本中,围绕工艺规划、机器人仿真、生产过程工程、服务工程、人因工程、工厂布局以及数字孪生验证等多个方向进行了全面升级。
1、机器人与自动化篇:重塑编程与分析体验
机器人在现代产线中扮演着绝对主角,DELMIA R2026x 带来了更为智能和易用的机器人管理工具 。
全新的机器人示教界面(New Robot Teach Interface)
全新的统一示教界面使用户能够快速定位并编辑机器人编程信息。
引入了新选项卡,以简化对速度、精度、运动类型、工具点、机器人坐标系和控制器设置的参数编辑。
机器人位置、示教首选项和回放功能均已集成到示教界面中,提供便捷访问。
")
一键导出工具分析报告(Tool Analysis Report)
白车身机器人工程师现在可以更轻松地管理焊接可行性:
用户可通过新的“工具分析报告”导出焊点可行性数据。
允许使用 Excel 功能整理结果,帮助优化焊点分布。
可轻松跨机器人和工站比较焊点可达性。
报告中直接显示焊点的名称和位置。
")
应对多配置产品(Product Variants)的焊点分配
轻松为每个机器人和多配置产品创建轨迹。
综合考量共用焊点和差异化焊点,以便分配或重新分配给各个机器人。
验证每条轨迹以确保适当的配置信息和可达性。
的焊点分配")
弧焊优化:焊接平衡与多层多道焊(Multi-pass Arc Welding)
焊接特征分配:轻松分析目标以创建焊接弧焊特征的多种场景,并在工作单元内的机器人之间快速平衡或重新分布弧焊轨迹。
多层多道焊:能够沿单个轮廓轻松创建多个机器人焊接路径,用于填充宽间隙和焊接厚钢板。
可在单一界面内轻松创建初始打底焊道(Root Pass)以及后续的附加焊道。
支持定义焊接参数,例如翻转方向(Flip Direction)、底部偏移(Base Offset)、壁面偏移(Wall Offset)等。
数字孪生直连CATIA CB

引入了新的接口,用于映射从 DELMIA Robotics 到 CATIA Control Build 的通信。
新接口大大降低了复杂性,并在设备层级(最低层级)简化了 I/O 映射。
不再需要从 Control Build 生成或重新生成 FMU 连接器,也无需在 DELMIA 逻辑控制器中导入 FMU。
通过直接访问 CATIA Control Build 的共享内存,实现更便捷的设置。

机器人原生编程语言支持
在2026FD01补丁中,支持了KUKA的NRL编程方式,即Native Robot Language方式进行编程。

2、人因工程篇:更全面的人口数据库支持与更便利的手部调节
人机工程学 (Ergonomics)
长期以来,DELMIA人体数据库来源于欧美,对于亚洲制造企业来说存在一定误差。
多国人群数据: 新增中国、日本、印度人群的人体模型数据集,确保亚洲地区的生产线安全与人体工程学评估准确性。

智能姿态引擎Smart Posturing Engine™ : 自动检测所有可抓取位置,从预定义的6个位置扩展到任意抓取点,大幅提高了姿态的真实感与评估精度。

3、工艺工程篇: 网页端与胖客户端的双向增强
Process Engineering一直是DELMIA制造规划体系的核心。围绕工艺工程的能力升级也是DELMIA的重中之重。本次更新主要解决如下几个问题:
新角色的导入:基于网页端的施工规划器(Construction Planner - P5D)
过去依赖Native Client的部分工作正式向Web迁移。未来用户仅通过浏览器即可完成绝大多数制造规划工作,这对于全球化协同企业而言意义重大。为了更好地服务于建筑工程领域提供精准的施工 BOM(CBOM)建模,并支持在WEB 端从工程 BOM(EBOM)进行浏览和导航 ,其功能增强主要包含以下几点:
支持定义和构建工作包及施工 BOM 元素结构。
能够将工程 BOM 元素链接至施工 BOM 元素,并直观可视化分配状态。
提供直观的施工 BOM 结构可视化界面。
支持管理施工 BOM 元素的生命周期。
基于 Web 的施工规划器界面。
")
造船/建筑/能源行业的数据类型调整:辅助项管理(Manage Auxiliary Items)优化
在实际制造中,诸如用于固定零件的小型夹具、螺母、螺栓等标准件通常不在工程模型中,但却包含在制造 BOM 中 。为了统一术语,系统将“辅助零件(auxiliary part)”正式更名为“辅助项(auxiliary item)” ,这有助于解决长期以来标准件管理复杂的问题。
全面支持辅助项的重新实例化。
允许使用不同类型的项目作为辅助项(以前仅限于提供的零件)。
产品计算结果现在可将辅助项的多重实例化纳入考量。
优化")
工厂资源管理器(MFA):精准的工厂时区定义
针对全球化多工厂协同,时区管理的准确性至关重要:
支持将工厂对象的时区定义为链接或继承的 ENOVIA Plant 时区之一 。
帮助用户在工厂结构中准确识别“生产上下文(production context)”。
:精准的工厂时区定义")
船舶结构制造与焊缝特征计算
针对船舶制造行业(MARINE),结构制造工程师(PSFEM)迎来了显著的性能与流程改进:
无需管理复杂的工程紧固件模型,即可高效管理制造焊缝项目信息和制造特征。
通过运行已知命令而无需创建工程紧固件模型,提供了一种更快、更高效的方法来生成结构制造的工艺交付物(特别适用于不需要设计数据中包含结构紧固件的商业项目)。
无需在工程和制造紧固件模型之间进行复杂、耗时且无附加值的更新循环管理。
基于干涉计算的基于规则的焊缝项目计算,可根据相邻零件的类型和接触模式定义要计算的特征。
工艺规划与作业指导升级
工程说明(Engineering Notes/3D Notes)作为贯穿制造PPR数据结构的一种数据对象,可以直接被如下数据结构识别和分配:
Manufacturing Item
Process Definition
Work Instruction
这些数据对象能够被隐藏或在多个视图中显示,从而更灵活的表达工艺要求。

4、服务工篇:新增数据结构以适配S3000L支持
服务工程/维修工程Service Engineering是本次更新的重要战略方向,在服务工程体系的支持方面,新增如下新数据对象的定义:
Servive Usage
Service Component
Service Items
这些类型的定义,加强了对S3000L支持力度。同时在服务工程文件的定义方面,加强了对于软件,硬件,区域的管理,严格控制软件硬件使用场地或使用场景,即限制相关服务资源(软件或硬件)在对应场地/场景的访问权限。
在备品备件目录库的编辑界面,增加了相关的界面操作便利性,减少点击操作,如通过拖拽方式进行操作。
这些升级对于航空航天和国防行业的维修维护领域意义重大。

5、虚拟工厂篇:工厂布局与物流仿真
工厂与物流仿真升级
离散事件仿真是虚拟工厂领域最重要的板块,首先在仿真能力方面:
新增了双向输送系统(Bi-Directional Conveyors)的支持。
支持AGV的路径优化。
支持各类统计报表颜色样式的客制化。

工厂布局与优化
工厂布局能够以点云扫描数据作为支持,在点云的操作处理方面有多方面的加强。
定制化点云的在本地的保存位置。
无需复制即可处理点云的子集,如显示/隐藏(之前需要空间筛选复制成为新文件后进行处理)。
在工厂布局设计中,可在自定义资源上下文中,增加碰撞检测能力,并增减对应的上下文编辑面板。
在如上描述的功能增强之外,还有非常多的体验改进性质的更新,比如在过滤/多选/分组/保留/移除等方面的操作方式改进,这些看似细小的改进对于大型项目而言能够提高操作流畅度,并节省大量工程时间。
纵观2026版本更新,可以看到DELMIA正在沿着5条主线持续演进:
从机器人编程、人因工程、工艺规划,到服务工程与虚拟工厂,DELMIA正在构建覆盖产品全生命周期的制造运营平台。
对于汽车、重卡、工程机械、航空航天、船舶、能源装备以及高科技电子行业而言,这些能力将帮助企业进一步提升制造效率与交付速度,并不断加强企业的全球协同能力,从而迈向真正意义上的智能制造新时代。
部分文章来源网络或用户投稿,如有侵权请联系本站删除!
获取SW正版免费试用,有任何疑问咨询热线:400-886-6353或 联系在线客服
未解决你的问题?请到「问答社区」反馈你遇到的问题,专业工程师为您解答!
- 相关内容
- 推荐产品
-
DELMIAWorks 2026 Work Center Log实操:数字化班次交接,杜绝车间信息丢失

-
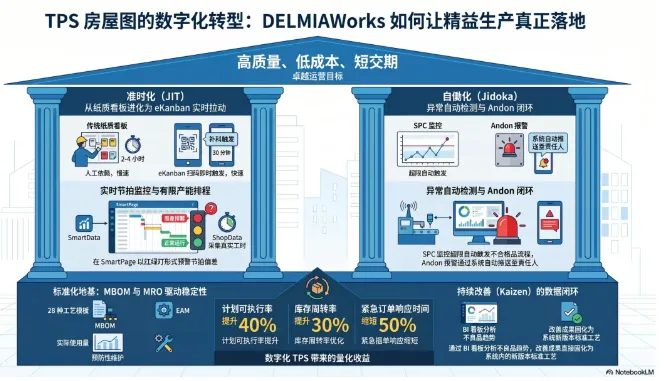
TPS丰田生产系统数字化落地|DELMIAWorks内置 JIT准时化与自动化完整方案
-
工业 AI仿真里程碑!达索SIMULIA 2027x 三大虚拟助手完整落地场景拆解

-
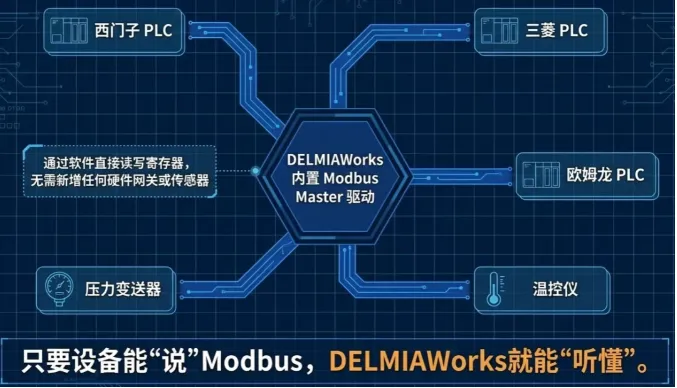
一台标准PLC就能用!DELMIAWorks Modbus监控,让老旧设备也能联网
-
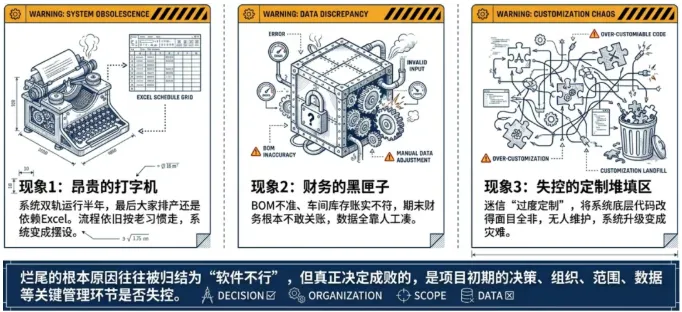
项目上了又停、停了又改?DELMIAWorks这套“防烂尾”体系,帮你把ERP做稳
-
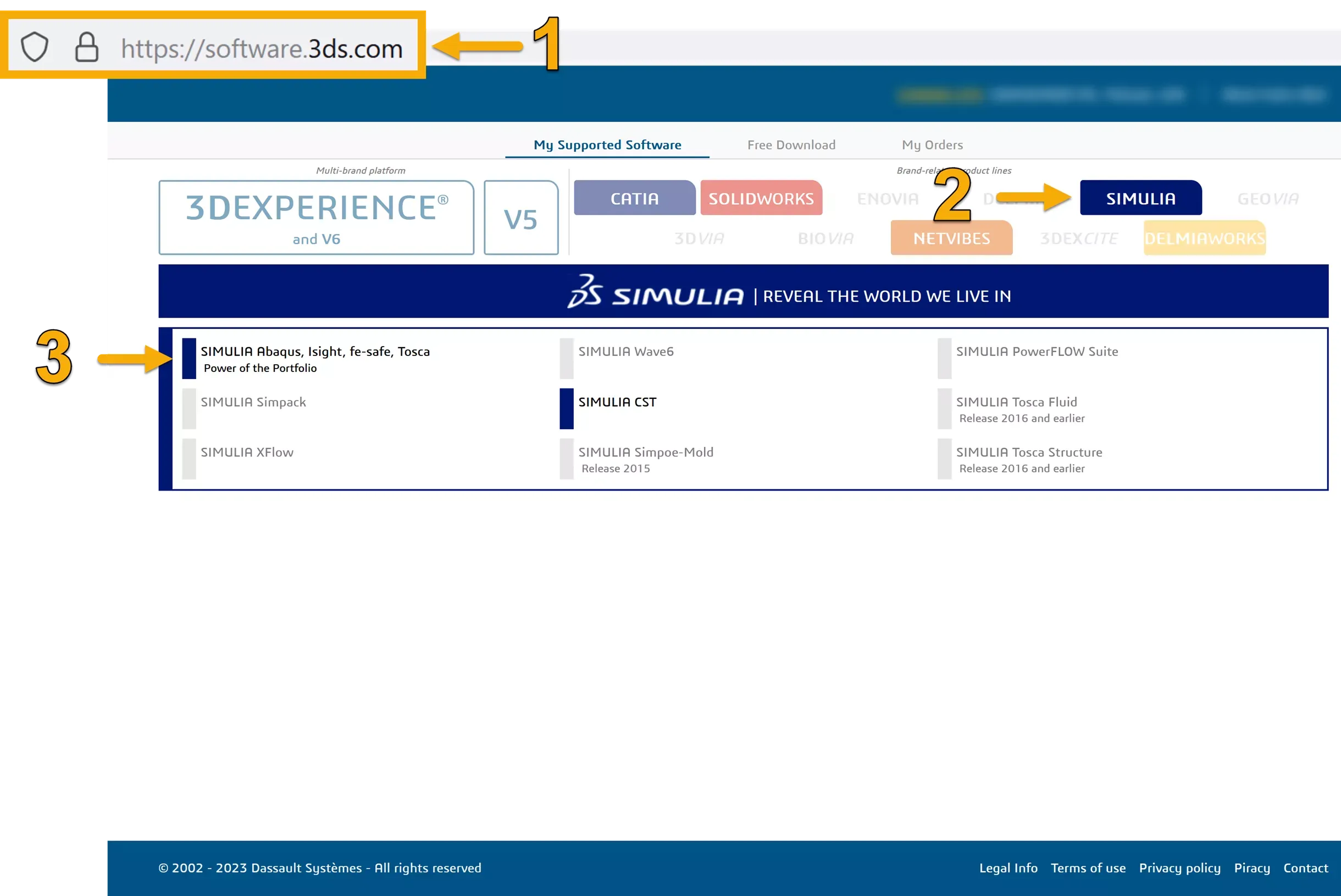
保姆级SIMULIA Abaqus安装教程,Windows/Linux双系统完整步骤




 SOLIDWORKS多功能插件ICTbox
SOLIDWORKS多功能插件ICTbox 
智诚科技工业服务项目承接
智诚科技ICT专注机械设计、仿真分析、电气开发、PLM实施、二次开发,专业工程师团队外包落地,助力企业降本增效