PowerFLOW潜艇流体仿真:水动力学、螺旋桨动力学及尾流追踪
日期:2026-04-08 发布者: Wouter Van Der Velden 浏览次数:次
本文将展示如何通过仿真技术优化效率、降低阻力、分析声学效应与尾流追踪,从而提升潜艇的水动力性能;并以 DARPA SUBOFF 基准模型为研究依托,演示 SIMULIA PowerFLOW 在潜艇水动力学研发全流程中的仿真分析流程。同时,本文还将介绍如何分别对艇体阻力、螺旋桨性能开展单独分析与实装状态分析,该仿真方法得出的数据与基准模型的实测数据高度吻合。
一、为何对潜艇开展仿真分析?
计算流体动力学(CFD)可对流体流动状态及流固耦合效应进行建模,海洋工程与海上工业领域已将 CFD 仿真技术广泛应用于船舶、潜艇及海上结构物的设计与分析工作中。
CFD 技术可对潜艇的水动力特性与航行阻力进行建模分析。潜艇艇体周围的水流会形成湍流区域,在艇体尖角与边缘部位尤为明显;此外,受弗劳德数影响的艇体边界层,其流态通常也为湍流。湍流的流动状态具有混沌性,相关计算难度较大,而格子玻尔兹曼方法(LBM)是对湍流进行建模的高效方法。SIMULIA PowerFLOW 采用融合大涡模拟(VLES)的格子玻尔兹曼方法,既能高效对大型几何体周围的流体流动进行建模,又能精准捕捉湍流的流动细节。
潜艇工程设计需考虑诸多特殊要求,潜艇需配备方向舵、尾鳍、升降舵等操纵面,通过这些操纵面可实现潜艇的三维空间运动,这一点与飞机的操控原理相似。正如空气动力学是保障飞机机动性能的关键,水动力学则是实现潜艇安全、高效操控的核心。借助仿真技术,工程师能够优化潜艇操纵面的设计方案,对艇体进行流线化设计,从而降低潜艇的航行阻力。
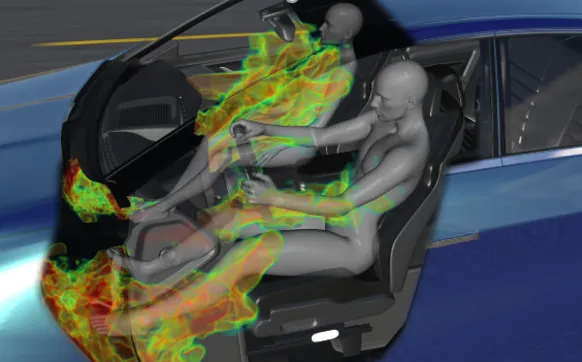
多数潜艇为海军应用场景设计,隐身性是其首要设计目标,潜艇的军事价值也正体现在其水下隐蔽机动的能力上。在雷达波无法穿透的深海区域,潜艇的可探测性主要取决于其与周围水体的相互作用。螺旋桨的空化效应会产生强烈的噪声,潜艇的湍流尾流也会带来噪声辐射问题,这类水下噪声可在水体中传播数英里之远。SIMULIA PowerFLOW 内置的声学求解器可直接对水中的噪声传播过程进行建模,无需整合多款不同的仿真工具。
潜艇在航行过程中还会留下易被识别的尾流,即艇体后方被扰动的湍流水体轨迹,这类尾流不仅可被水下探测设备捕捉,甚至还会在海面形成可被观测的波浪。SIMULIA PowerFLOW 中基于格子玻尔兹曼方法研发的高效求解器,能够对潜艇后方长距离的尾流传播过程进行建模,助力工程师找到最小化潜艇残余湍流尾流的解决方案。
SIMULIA PowerFLOW 是达索系统产品体系的重要组成部分,达索 3DEXPERIENCE 平台还搭载了SOLIDWORKS、 CATIA 等设计工具。统一建模与仿真(MODSIM) 理念打破了设计师与仿真分析师之间的信息壁垒,让设计师无需制作并测试物理原型,即可对设计方案的性能进行评估。这一模式能够简化产品研发流程、降低研发成本,同时最大限度减少设计风险。
二、潜艇水动力学仿真分析流程
艇体阻力分析
艇体阻力分析可分为两个维度开展,一是对裸艇体的阻力分析,二是对搭载升降舵、指挥台围壳等附体的完整装配艇体的阻力分析。在 DARPA SUBOFF 基准模型体系中,裸艇体被标注为 AFF-1,带附体的艇体则标注为 AFF-8。本研究首先开展了艇体总阻力的计算分析,如下图所示,在所有水流速度工况下,仿真计算数据与实测数据均高度吻合。

上图为 PowerFLOW 仿真得出的艇体阻力数据,与刘和黄在 1998 年《DARPA SUBOFF 实验项目数据汇总》中公布的实测数据的对比结果,左图为 AFF-1 裸艇体,右图为 AFF-8 带附体艇体。
在所有水流速度下的仿真精度得到验证后,我们可进一步分析艇体表面的压力分布与摩擦阻力特性,捕捉艇艏阻力、升降舵对水流的影响等局部流场效应,仿真结果与实测数据依旧高度吻合。这一吻合性在潜艇艇艏区域表现得尤为明显,仿真不仅精准预测了该区域压力与摩擦阻力的峰值,还准确还原了其变化斜率。这表明该仿真方法有效捕捉了边界层的关键特征,包括边界层厚度与转捩位置,这些结果充分印证了仿真技术在还原潜艇关键局部流场现象方面的可靠性。
与摩擦阻力(右)数据")
上图为 AFF-1 裸艇体的仿真压力分布(左)与摩擦阻力(右)数据,与黄 1992 年公布的实测数据的对比结果。
敞水螺旋桨性能分析
除艇体阻力验证外,本研究还分别对螺旋桨的敞水性能(单独工作状态)与实装性能(装配至艇体后工作状态)开展了分析。关于螺旋桨仿真分析流程的完整说明,本文以 INSEAN E1619 螺旋桨为基准模型进行演示,更多细节可参阅我们的博文《基于 SIMULIA PowerFLOW 验证水下螺旋桨性能》。
总体而言,仿真得出的螺旋桨性能曲线与实测曲线高度贴合。
、扭矩系数(10KQ)与效率(η)对比结果")
上图为螺旋桨的推力系数(KT)、扭矩系数(10KQ)与效率(η)对比结果,橙色为 INSEAN 基准实测数据,蓝色为 PowerFLOW 仿真数据;实测数据来自意大利国家研究委员会船舶工程研究所的安德里亚・曼奇尼,于 2006 年 3 月 16 日完成测试。
尾流追踪分析
仅单独对艇体和螺旋桨开展仿真分析,无法全面掌握潜艇作为完整航行器的水动力运行特性。潜艇艇体及其附体在航行中产生的尾流,会导致螺旋桨周围的流场失稳,进而影响潜艇受到的总航行阻力,同时也会改变尾流的传播规律。因此,对潜艇水动力学的完整分析,必须将实装至艇体的螺旋桨纳入分析体系。
对潜艇近尾流剖面的分析,既能对实装螺旋桨的工作性能进行更全面的定性评估,也能进一步验证仿真分析的精度。下图展示了仿真得出的尾流结果与粒子图像测速(PIV)实测结果的对比情况。
在 x/LOA=0.978 位置的尾流等值线对比,左图为仿真结果,右图为实测结果")
上图为带附体配置的潜艇(AFF-8)在 x/LOA=0.978 位置的尾流等值线对比,左图为仿真结果,右图为实测结果;实测数据来自蔡斯在 2012 年《含 E1619 螺旋桨自航状态的 DARPA SUBOFF 潜艇仿真》一文中公布的内容。
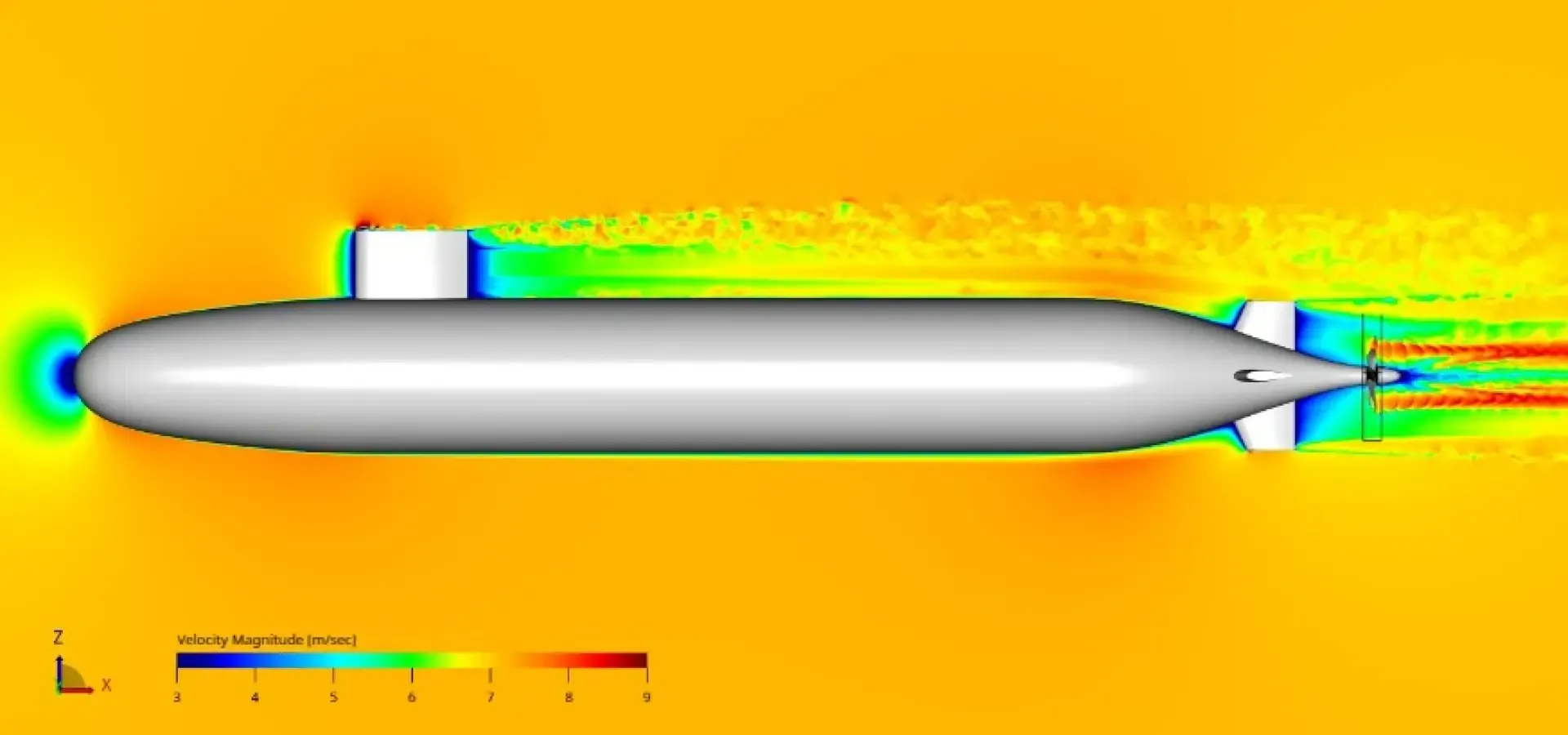
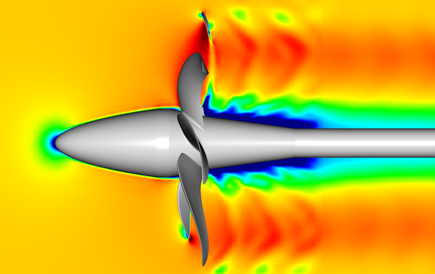
尾迹轮廓模拟的侧面视图。
仿真分析揭示了潜艇尾流的多个关键特征:第一,螺旋桨紧邻区域的尾流速度极高,这是最直观的特征;第二,潜艇尾部的四个附体在尾流中形成了四个清晰的凸起区域;第三,艇体顶部的指挥台围壳会产生微弱的尾流,尽管该尾流的影响较小,但仍可能与螺旋桨尾流相互作用,进而引发流场失稳。上述三类特征在仿真结果与实测数据中均清晰可见。此外,仿真数据中还捕捉到了第四个特征 —— 附体梢部产生的涡流,受粒子图像测速(PIV)技术的分辨率限制,这一特征在实测数据中无法被观测到。由此可见,在本研究案例中,仿真技术捕捉到了实测手段未能发现的流场运动规律。
本研究还对潜艇的远尾流开展了分析,PowerFLOW 针对湍流流动的高效仿真能力,使其能够模拟出潜艇后方 10 倍艇长距离内的尾流场。通过掌握远尾流的分布规律,以及其对潜艇水动力特性和声学特性的影响,工程师能够优化潜艇设计方案,削弱潜艇的尾流特征,从而提升其水下隐身性能。

上图为潜艇远尾流的仿真结果,包含侧视图与三维等值面视图。
三、结论
仿真技术助力海洋工程师设计出效率更高、隐身性更优的潜艇。SIMULIA PowerFLOW 采用格子玻尔兹曼方法,可对艇体(含所有附体)与螺旋桨周围的流体流动进行精准建模,能够很好地应对潜艇水动力学仿真的各类技术挑战。该软件的仿真精度已通过多项权威基准模型验证,仿真数据与实测数据高度吻合。结合统一建模与仿真(MODSIM)流程,仿真技术可全面融入潜艇的整体设计流程中。SIMULIA PowerFLOW 与 3DEXPERIENCE 平台上的SOLIDWORKS,CATIA 等设计工具,以及其他 SIMULIA 系列仿真工具实现了深度集成,形成了一体化的设计与仿真体系。
获取正版软件免费试用资格,有任何疑问拨咨询热线:400-886-6353或 联系在线客服
未解决你的问题?请到「问答社区」反馈你遇到的问题,专业工程师为您解答!