3DEXPERIENCE利用MODSIM设计驱动的仿真工具设计更隐身的潜艇
日期:2026-03-25 发布者: Katie Corey 浏览次数:次
了解MODSIM如何推动现代海底防御技术的发展,以隐身设计为例,展示MODSIM方法的优势。
隐身性和可探测性是潜艇设计的关键方面。潜艇在水面上的雷达截面(RCS)不仅取决于船只的几何形状,还取决于水面上的流体动力学尾迹。仿真可用于分析半潜艇运动中的RCS,并优化几何形状以最小化尾流的RCS。统一的建模与仿真方法(MODSIM)使仿真结果能够指导设计,缩短开发流程,打造出既满足隐身要求又不影响其他目标的潜艇。
简介
潜艇工程是一项挑战——很少有工程领域需要如此精确地控制如此多不同的物理领域。一个成功、安全可靠的水下舰艇设计必须能够承受深海水的压力、波浪的压力以及战斗中的冲击压力。它必须尽可能以最小阻力安静地行驶,同时最小化雷达反射截面。其液压、电气、热能、通风和机械系统都至关重要,所有系统都需要连续数月可靠运行。
这意味着潜艇开发需要由多个专业团队组成的大型团队协同工作,才能打造出能够执行水下防御任务的完全能力舰艇。
本文将展示MODSIM统一建模与仿真如何推动现代水下防御技术的发展,并以隐形设计为例,展示MODSIM方法的优势。
流体动力学与雷达
潜艇的可探测性取决于多个因素。潜艇的噪声特征影响被动声纳探测的容易程度。这种声音不仅仅是船内机械产生的振动和噪音——船体本身的水动力学设计会影响水流湍流时的噪声,尤其是在控制面周围。优化不良的设计会产生过多噪声,并提高船舶的可检测性。
另一个重要因素是雷达截面(RCS)。当雷达波击中船只时,会被反射并散射。向接收器方向反射的波浪使敌人能够探测潜艇。因此,隐形设计的基本原则之一是尽量减少背向散射。对于靠近水面的海底船舶,水动力学使情况更加复杂,因为尾迹会产生复杂的自由表面变形模式。
为了最大化潜行效果,我们需要同时应对这两种效果。这意味着海军建筑师、雷达工程师和计算流体力学(CFD)专家都需要在多领域、多目标的工作流程中协同工作。
隐形设计工作流程
潜艇建模

图1:整个军用潜艇模型外部外壳的视图。
降低可检测性的工作流程从开发早期就开始。越早考虑隐形因素,测试后期发现问题的风险越小,找到最优解的可能性也越大。一旦船体的初始CAD模型可用,工作即可开始。
项目首先充分利用“需求、功能、逻辑与物理”(RFLP)数据模型,构建图1所示的CAD模型。模型几何体采用CATIA或SOLIDWORKS角色构建,参数允许后续优化,因此可以立即提供用于3D体验平台.CAD模型比模拟所需的更为详细,因此自动去特征提升了模拟性能。
潜艇系统的动态行为通过Dymola Behavior Modeling(DBM)应用程序进行建模和模拟,该应用集成了1D建模和仿真环境,运行在3DEXPERIENCE平台上。DBM直接从CAD数据生成多体系统模型,并提供系统行为的三维可视化和动画功能。该模型用于生成潜艇的多体模型,包括控制面。通过这些技术,用户可以研究潜艇在不同作战条件下的流体动力学行为或驱动策略。压载舱的控制系统可以被精确建模,以真实地表现浮出水面和潜水行为。模拟还可以考虑不同的驱动单元——例如柴油发动机或燃料电池。上述过程已完整总结于图2。

图2:水动力系统工作流程描述。
控制系统仿真结果与测试需求进行比较(见图3)。如果这些条件未被满足,模型参数和拓扑可以通过迭代过程进行修改,直到达到目标行为。

图3:控制器优化后海底水动力学行为的结果图。
用计算流体动力学建模尾迹
一旦几何形状和控制面得到优化,我们就能计算潜艇的流体动力尾迹。我们使用西穆利亚流体动力学工程师,利用最先进的无结构二阶全隐式有限体积雷诺-平均纳维-斯托克斯(RANS)求解器来模拟流动,包括湍流。水与空气界面,即表面尾迹形成处,通过多相流体体积(VOF)公式求解。自由表面VOF等值等高线图是我们下一阶段仿真所需的数据。图4展示了半潜艇的一个例子。
任何流仿真都需要仔细网格化,因为这会影响收敛行为——决定模拟速度——以及结果的准确性。在MODSIM下,网格化是一个高度自动化的过程。
。颜色表示身高变化。")
图4:在14kn的入流速度下,自由表面高度的放大(Fr = 0.23)。颜色表示身高变化。
利用电磁仿真分析RCS
本次模拟中,我们使用了射线与边界射线(SBR)模型,配合计算机模拟技术(CST)Studio Suite 中的渐近求解器。SBR方法已被证明在模拟大型结构时有效且准确。CST Studio Suite SBR方法包括遮挡和多径效应,以及物理衍射理论(PTD)和统一衍射理论(UTD),以提高精度,使其成为雷达截面(RCS)评估和海上雷达信号生成的有效电磁工具。
自由表面VOF等值等高线图直接从流体动力学工程师(FMK)应用中转换为镶嵌网格CST工作室套房通过3DEXPERIENCE平台。这提供了唯一的真实来源,收集了所有不同的建模和仿真数据,以及需求、功能、逻辑与物理框架(RFLP),集中在所有团队成员都能访问的单一地点。每个人都能访问所有文件的最新版本,减少了因使用不同版本数据或不兼容文件格式而导致的混淆和延迟风险。可追溯性在不同设计迭代中得以保持。这些过程形成了整体雷达特征工作流描述,如图5所示。

图5:雷达特征工作流描述。
计算RCS时,沿方位角0至360度进行单静散射模拟,步幅为0.1度,且仰角为1度(近海平面)。换言之,雷达散射在扫掠周围的每个方位角计算,并以目标一维图绘制,目标即潜艇在海面以上的部分。海洋本身不是目标,但由于我们希望观察海浪对潜艇RCS的影响,必须将海洋纳入模拟。传统雷达将海面直接反射识别为杂波,并自动抵消这些反射,以便潜望镜的反射频率仍能被隔离,包括海面效应。仿真中也同样如此。
图6和图7展示了完整潜艇的RCS——这里绘制了完整的三维远景图以供说明。
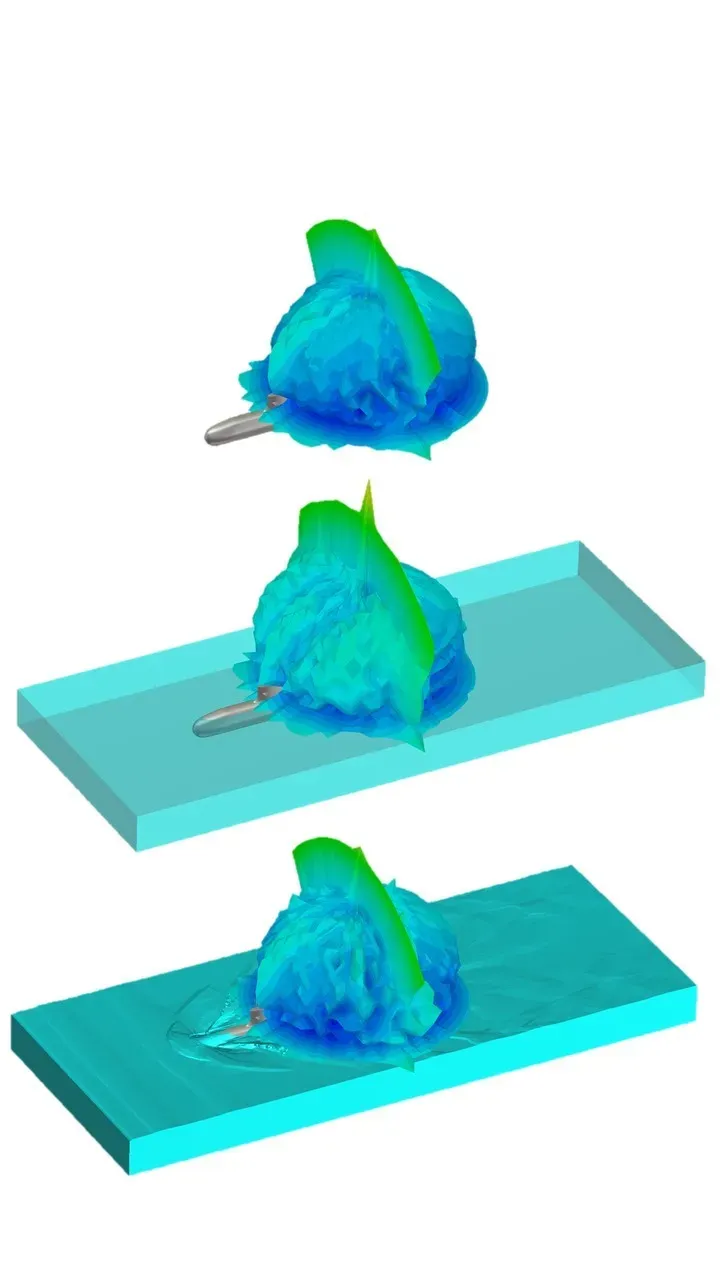
图6:潜艇RCS的三维远场,处于隔离状态(上方)、置于平面海面(中方)、置于VOF(下方)时。
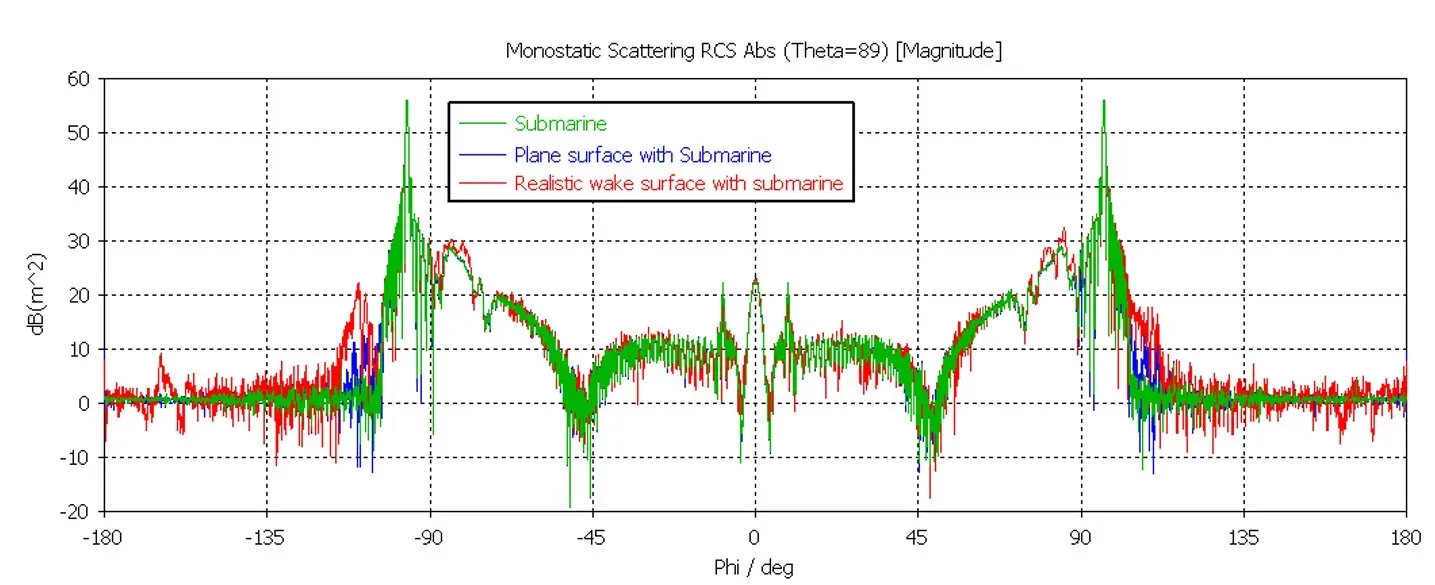
图7:潜艇的矩形RCS图(红色)、平面面与潜艇(蓝色)以及真实尾迹面与潜艇(绿色)。
结果显示,加入理想海水块会改变潜艇的RCS,用尾迹替代该块体,进一步改变RCS,从而提高整体精度。
仿真主导的设计与优化
常规潜艇使用潜望镜和通气管作为垂直辅助装置,接近并突破自由水面。这意味着这些是水动力学扰动和湍流的主要来源。这导致水流不稳定,浮潜速度低于5米/秒时出现高且陡的船首波浪。这种波可以通过雷达或目视观测识别。为解决这个问题,潜望镜上加装挡板——此时,潜望镜上方的螺旋条阻断了船首波浪的发展(见图7)。该板状模型参数化,使螺旋的厚度和角度可以变化,用于元件优化研究。
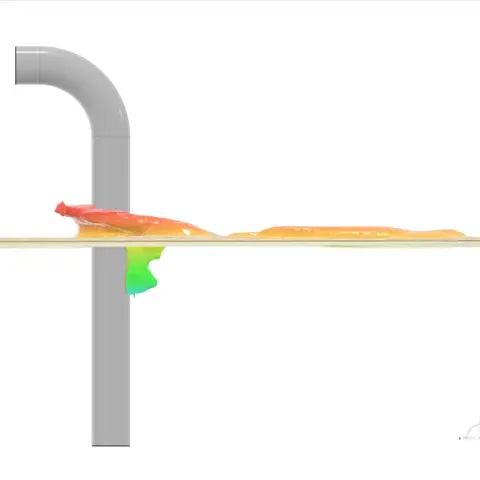
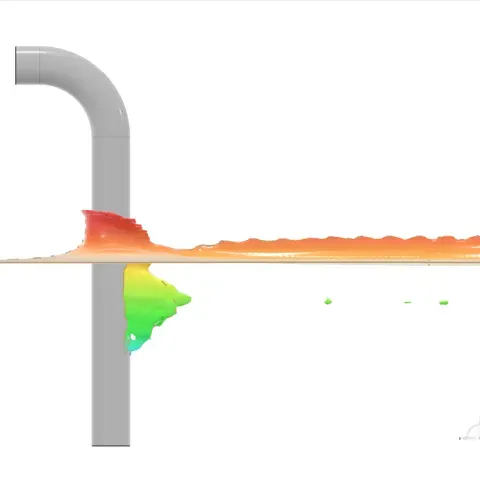
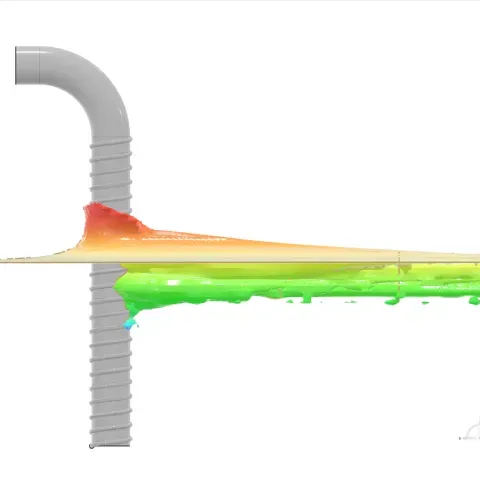
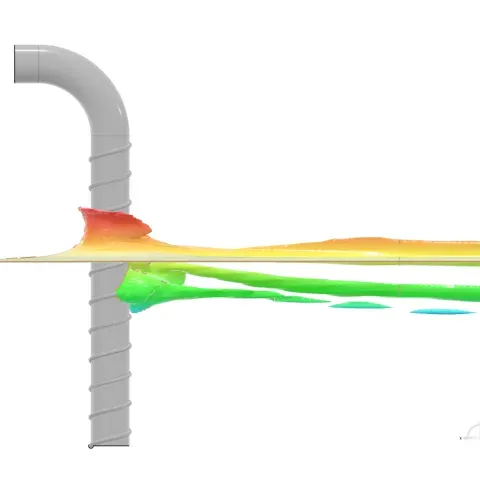
图8:左上角独立潜望镜(Fr = 1.3)、(右上)孤立潜望镜(Fr = 1.8)、(左下角)带150毫米螺旋板的潜望镜(Fr = 1.8)、(右下角)带300毫米螺旋板的潜望镜(Fr = 1.8)自由水面仰角的侧视图。
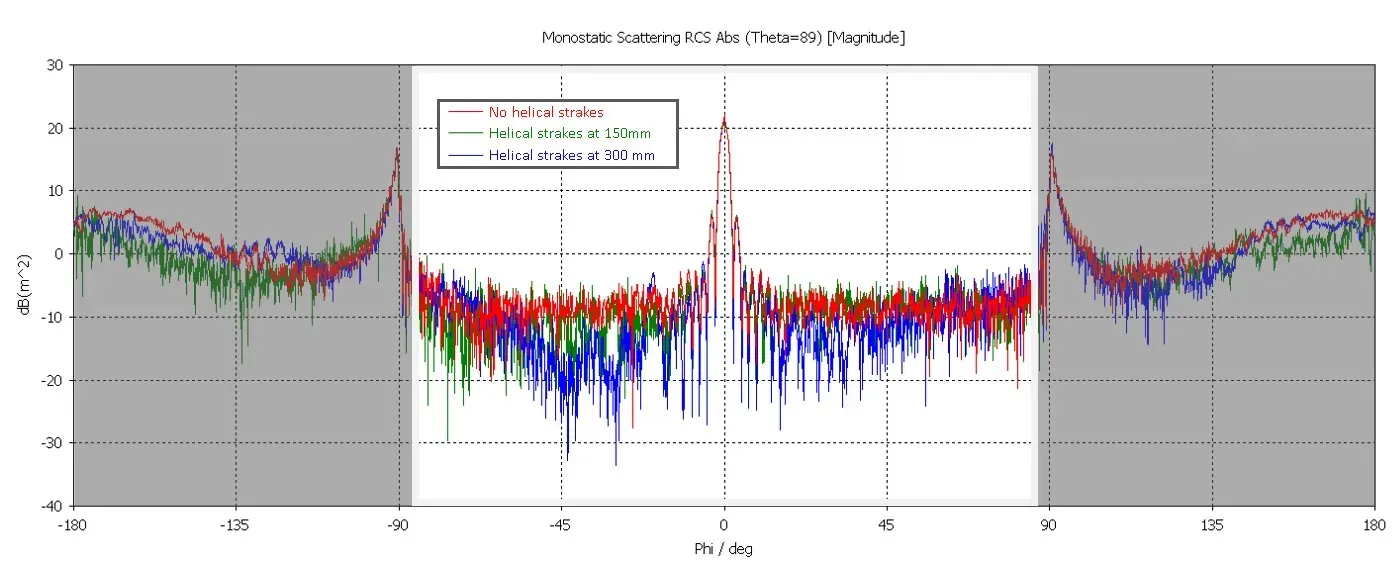
图9:潜艇潜望镜的矩形RCS图,没有螺旋条纹(红色),螺旋条纹150毫米(绿色),螺旋条纹300毫米(蓝色)。
大多数潜艇制造商只关注从正面提升隐身能力,因为只有当潜艇进入敌方领土时,隐身才成为关键要求。当潜艇撤退时,隐身可能不再那么重要。因此,方位平面的角度范围可假设为-80至+80度。这一点在图9中得到了突出,图中显示了潜艇潜望镜改装时RCS的变化。尤其是300毫米口径的螺旋舵的增加,显著降低了雷达控制率(RCS)在关注范围内的射程。由于采用了MODSIM方法,模拟中优化的潜望镜设计可以轻松地返回模型并整合进最终潜艇设计中。
结论
MODSIM,即统一建模与仿真,使工程师能够更快更高效地开发前沿设计。对于一艘水下防御舰艇,MODSIM支持隐身目的的完整RCS分析,涵盖多个物理领域。CAD和CAE的统一使潜艇设计数据能够轻松转换为仿真模型,而在3DEXPERIENCE平台上集成不同仿真工具,使系统、电磁和流体仿真能够结合为一个工作流程,准确捕捉雷达散射与流体动力尾迹的复杂相互作用。通过MODSIM,工程师们能够快速找到最优潜望镜几何形状,降低RCS,提升隐身性能,并将这些改进融入最终设计中。
国防工业正朝着基于模型的采集.这需要采购流程的数字化转型,采用防务机构与供应商之间新的协作方式。了解更多设计和工程下一代海军防御平台配备3D体验平台。
部分文章来源网络或用户投稿,如有侵权请联系本站删除!
获取SW正版免费试用,有任何疑问咨询热线:400-886-6353或 联系在线客服
未解决你的问题?请到「问答社区」反馈你遇到的问题,专业工程师为您解答!
- 相关内容
- 推荐产品
-
3DEXPERIENCE 平台导入 / 导出数据包工具使用全解
-
3DEXPERIENCE平台上多版本SOLIDWORKS工作站共存安装说明
-
3DEXPERIENCE 平台流体动力学工程师角色 —— 旋转区域功能详解
-
解答SOLIDWORKS用户关于3DEXPERIENCE平台的高频常见问题

-
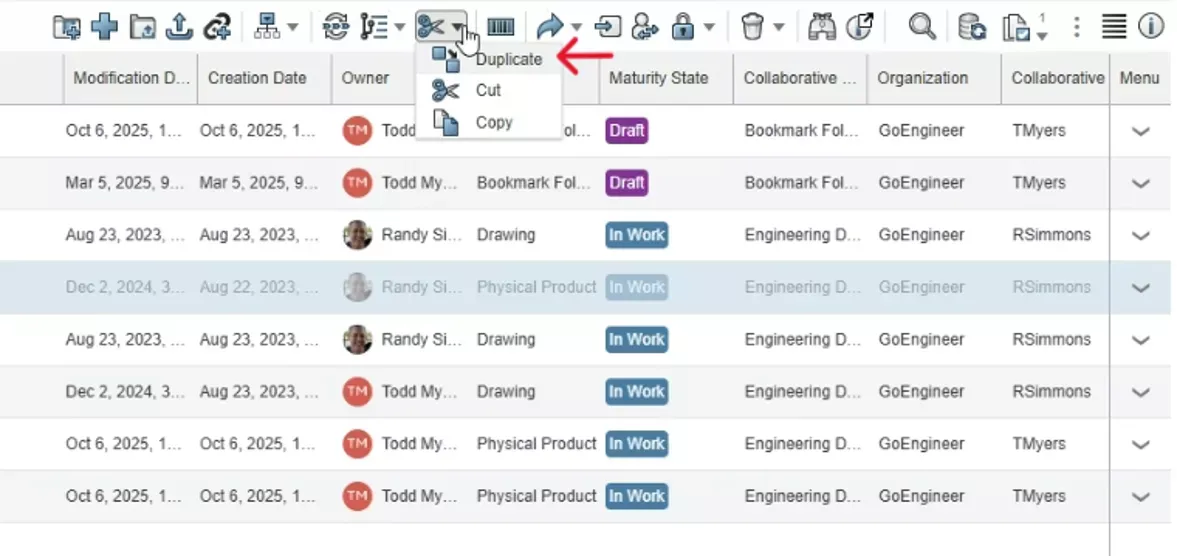
3DEXPERIENCE复制(Duplicate)功能的优势
-
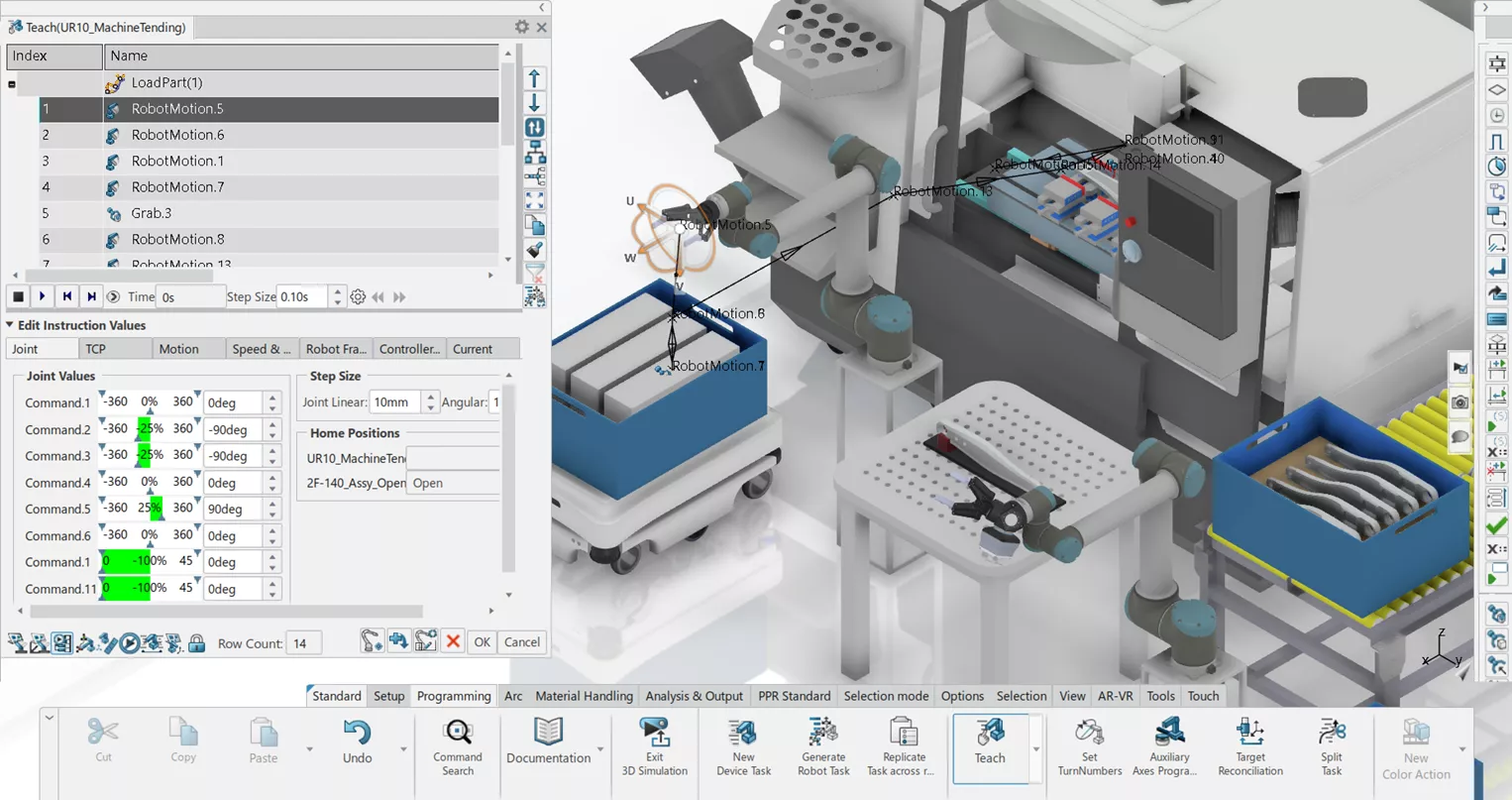
基于 3DEXPERIENCE ROBOTICS 实现机器人离线编程
-
 3DEXPERIENCE WORKS
3DEXPERIENCE WORKS
产品 -
 3DEXPERIENCE DraftSight
3DEXPERIENCE DraftSight
产品 -
 3DEXPERIENCE SOLIDWORKS
3DEXPERIENCE SOLIDWORKS
产品 -
 3DEXPERIENCE Works Simulation
3DEXPERIENCE Works Simulation
产品 -
 3DEXPERIENCE ENOVIA
3DEXPERIENCE ENOVIA
产品
 SOLIDWORKS多功能插件ICTbox
SOLIDWORKS多功能插件ICTbox 
智诚科技工业服务项目承接
智诚科技ICT专注机械设计、仿真分析、电气开发、PLM实施、二次开发,专业工程师团队外包落地,助力企业降本增效