达索系统SOLIDWORKS定义矿山安全新高度
在露天矿场的高风险、复杂地形中,运送爆炸物等危险材料一直是一项极具挑战的任务。传统的作业模式往往伴随着巨大的安全风险,一旦发生事故,后果不堪设想。
Jevons Robotics,一家来自澳大利亚珀斯的初创公司,正致力于通过创新的ARTEV6000机器人改变这一现状。为了在紧迫的交付期限内开发出这款自动化电动车辆,他们选择了达索系统SOLIDWORKS建模、设计、仿真及协作解决方案,为矿区安全保驾护航 。
01、人才无缝衔接
作为一家快速成长的初创公司,Jevons Robotics面临的首要挑战是如何在最短时间内组建高效团队并启动项目。首席运营官David Crosbie发现,SOLIDWORKS 在工程师群体中拥有极高的普及度和知名度,这为公司提供了庞大的人才库 。
由于SOLIDWORKS几乎没有学习曲线和额外的培训需求,团队成员能够迅速上手并投入工作。这种“即插即用”的设计环境让Jevons Robotics得以在创纪录的时间内完成从概念到验证的跨越,确保了项目能够按时交付给重要客户 。
02、多维并行协作
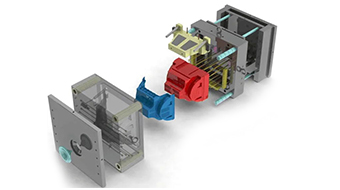
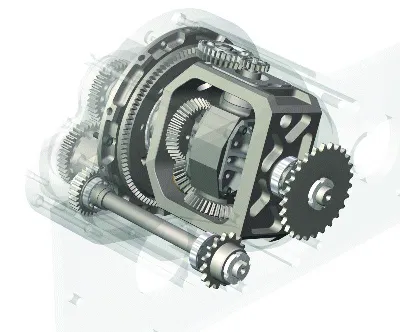
ARTEV6000是一个复杂的系统工程,包含底盘、精确定位系统和高压模块等多个子系统。借助SOLIDWORKS强大的协作能力,工程师们能够实现多个子系统的并行设计与制造 。
高级工程师Adrian Gil强调,这种协同模式让设计团队可以实时了解各模块的开发进度,有效避免了机械干扰、电气布线冲突以及组装过程中的空间占用问题 。通过在设计阶段就验证系统间的健康交互,Jevons大大减少了制造迭代次数,并优化了装配构建时间 。
03、全方位仿真验证
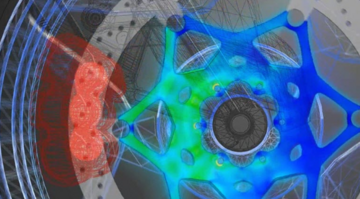
对于运输危险材料的机器人而言,结构安全是重中之重。Jevons利用SOLIDWORKS集成的仿真工具,对承载组件进行了严苛的线性静态应力分析,并针对每个子系统进行了安全系数要求验证 。
通过在软件中快速验证新想法和新概念,团队能够精准优化几何形状与材料,确保底盘和关键锁紧组件在极端环境下依然稳固可靠。这种“仿真驱动设计”的方法,不仅显著提高了产品的整体安全性,还通过减少物理原型测试,为公司节省了大量的时间和资金成本。
如今,ARTEV6000已成功通过概念验证,并即将部署到矿区一线,将人们从危险的“脏活累活”中解放出来。
SOLIDWORKS提供的全方位技术支持,正是Jevons Robotics实现这一使命的核心动力 。