SOLIDWORKS CAD 如何拯救我的章鱼博士装备制作项目
日期:2026-05-15 发布者: Tyler Csatari 浏览次数:次
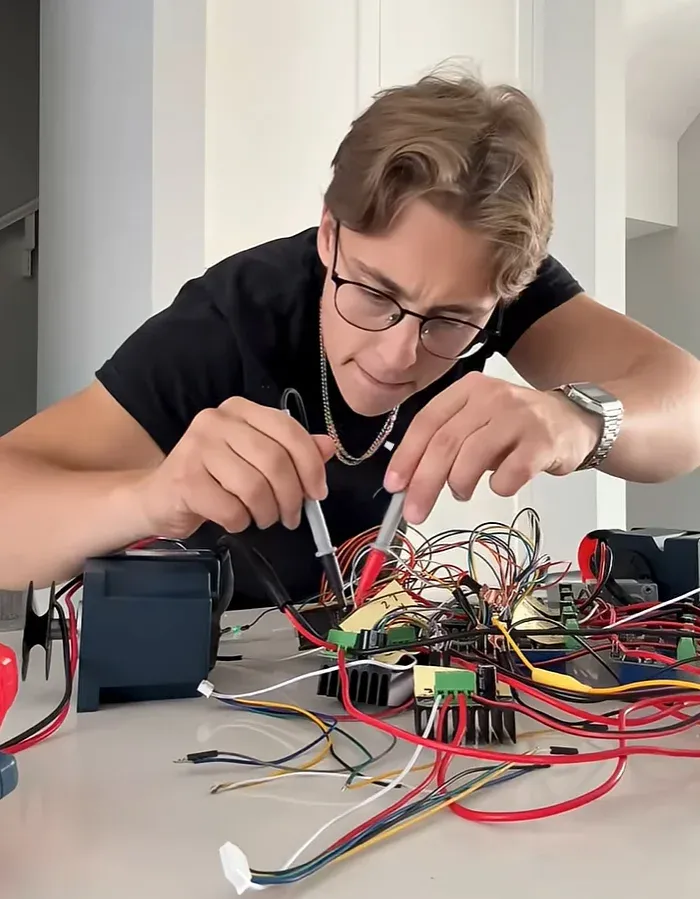
泰勒・察塔里分享了面向创客版 SOLIDWORKS如何借助专业级 CAD 设计工具,助力他重新打造可动的章鱼博士(Doctor Octopus,简称 Doc Ock)真人穿戴装备,实现个人创作落地。
在我上一篇关于该 SOLIDWORKS 项目的博客中,我提到了自己的宏大目标:打造史上最还原的章鱼博士装备。我希望它做到极致逼真,配备四条可真实活动、具备完整功能的机械臂,搭配能够抓取物体甚至喷射火焰的机械爪。为此,我在材料上花费了数千美元,还购入了一台价值 3000 美元的等离子切割机。但就在这时,我突然意识到:自己犯了一个极其严重的错误。
制作遭遇现实瓶颈
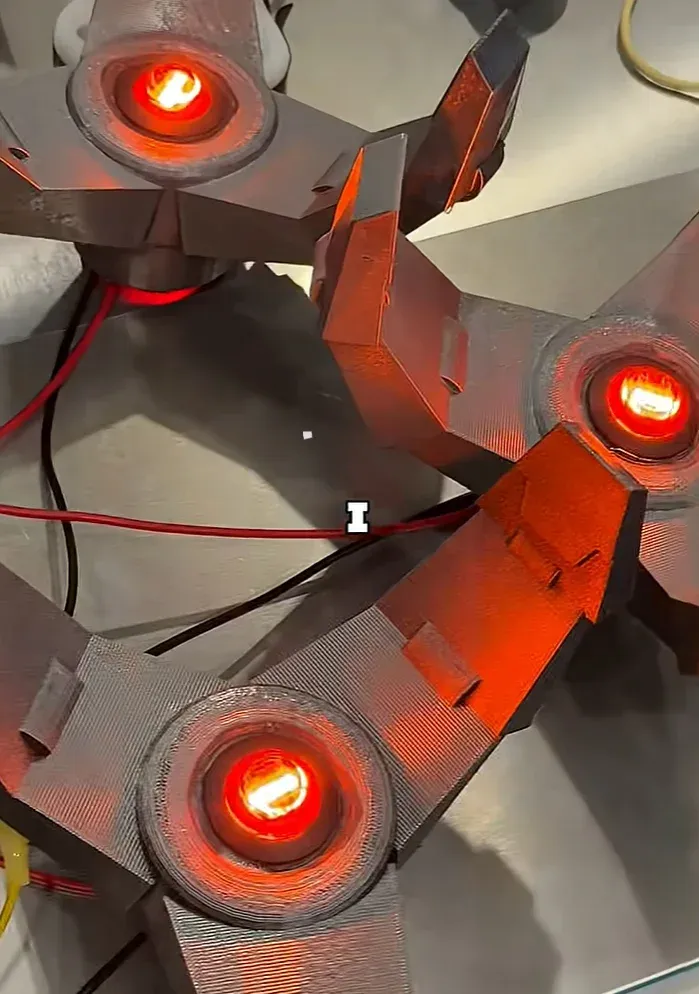
去年 10 月,机械臂完成 3D 打印、线路布线,实现了基础活动。我制作了内置灯光的机械爪、完成了电机安装,背带总成也逐步成型,但机械臂却过于松软,总会朝各种奇怪的方向弯折 —— 这完全不是我想要的效果。我想要的是一套完全复刻电影质感的章鱼博士装备。
我尝试用橡皮筋加固机械臂,提升关节刚度。在小尺寸模型上,这个方法确实奏效!可一旦将尺寸放大到 4 英尺长的机械臂,问题立刻变得一团糟。额外的重量与结构复杂度带来的新问题,比我能解决的旧问题还要多。

用 SOLIDWORKS 重新设计机械臂
在这个阶段,我意识到对实物模型做小修小改,根本无法实现我的目标。我需要彻底推翻原有设计思路。
于是,我放下工作台的实物,重新投入 SOLIDWORKS 的设计工作,重新设计所有贯穿玻璃纤维杆的关节结构。这次重新设计能让机械臂实现灵活弯折,同时不会发生塌陷。在设计过程中,我在 SOLIDWORKS 中重构了机械臂关节,将玻璃纤维杆集成到结构中,确保机械臂在载荷下仍能保持形态。我还添加了外环结构,让运动更顺滑,让机械臂的动作更可控。
为了提升装备的炫酷效果,我决定额外增加两个环,并采用橡胶材质进行 3D 打印。这意味着我需要升级设备,购入两台全新的多材料 3D 打印机。随后,我连续打印了 10 天,制作出所需的 240 个不同零件。但这仅仅是开始 —— 我到底该如何把整套装备固定在背上?
背板成为最大瓶颈
我开始设计 2D 背板图纸,用于固定所有部件,并调试新购入的等离子切割机,准备用钢板切割制作背板。我完成了电机安装,固定好这块金属导向板,用于牵引拉绳,避免拉绳磨损底部关节。可当我最终测试时,摩擦力却大到无法接受,还直接烧坏了两台电机。
于是,我采购了新材料,尝试重新设计基座结构。我将机械臂的安装位置适当抬高,让凯夫拉绳能够无摩擦地穿过,最终终于让所有结构正常运转。我还需要拆解并重新组装另外三条机械臂,完成所有部件的粘接与喷漆。这部分工作耗费了极长的时间。
当我终于将所有部件安装到新背板上,并固定好所有电子元件后,我终于可以进行整机测试了。

机械爪无法正常工作
遗憾的是,新的问题出现了:机械爪无法正常动作,而我还想测试这套装备的实际载重能力。我查阅了市面上的产品,发现大多数在售机械爪仅能举起几磅重的物体。更不用说它们价格极其昂贵,外观也完全不像章鱼博士的机械爪。
就在这时,我决定再次投入 SOLIDWORKS 的设计工作,尝试打造世界上承载力最强的机械爪。为了这个项目,我已经花费了超过 80 个小时学习和实操 SOLIDWORKS,设计水平也越来越高。每一次重新设计,都让下一次迭代更高效;每一次失败,都排除了一个未知问题。到了这个阶段,这个项目的核心已经不再是快速完工,而是打造出真正合格、可靠的作品。

将 CAD 用于创客与 Cosplay 装备制作
如果你正在制作需要活动、承载载荷、承受实际使用的项目,将 CAD 融入设计流程,会带来颠覆性的改变。CAD 往往是真正解决问题的核心,而不是仅仅做表面修补。
至于章鱼博士的机械爪,目前仍在研发中。我对这个项目的最终构想,比目前展示的所有效果都要更震撼。等机械爪调试完成、正常运行后,我会第一时间和大家同步进展!
部分文章来源网络或用户投稿,如有侵权请联系本站删除!
获取SW正版免费试用,有任何疑问咨询热线:400-886-6353或 联系在线客服
未解决你的问题?请到「问答社区」反馈你遇到的问题,专业工程师为您解答!
- 相关内容
- 推荐产品
-
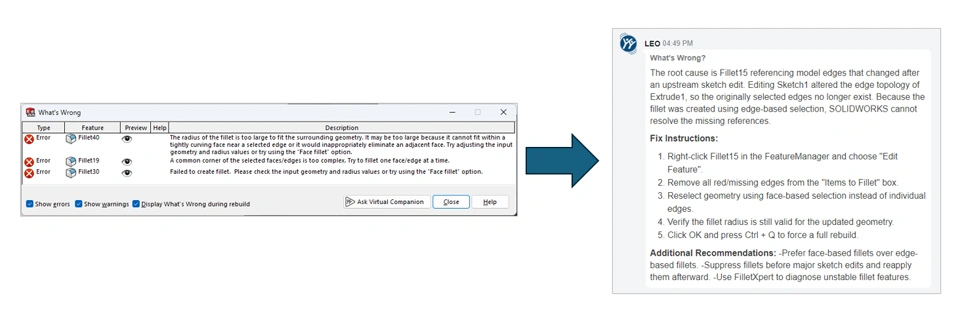
如何使用SOLIDWORKS AI 智能助手分析解决建模报错问题?
-
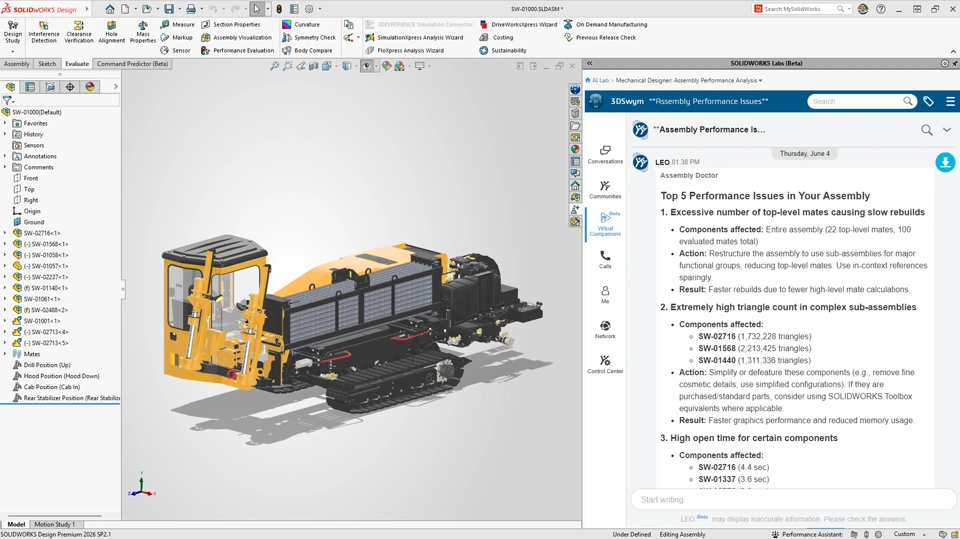
使用SOLIDWORKS AI助手 LEO完成装配体性能评估与优化方案
-
SOLIDWORKS Simulation 缆索接头功能详解
-
达索系统SOLIDWORKS 2026如何刷新你的设计生产力!

-
SOLIDWORKS AI智能助手如何开启使用?
-
SOLIDWORKS Design 2026可视化与渲染功能升级,打造沉浸式产品视觉体验
-
 SOLIDWORKS Manage
SOLIDWORKS Manage
产品 -
 CircuitWorks for SOLIDWORKS
CircuitWorks for SOLIDWORKS
产品 -
 CadMouse
CadMouse
产品 -
 SOLIDWORKS 3D CAD
SOLIDWORKS 3D CAD
产品 -
 3DEXPERIENCE SOLIDWORKS
3DEXPERIENCE SOLIDWORKS
产品 -
 SOLIDWORKS Simulation
SOLIDWORKS Simulation
产品
 SOLIDWORKS多功能插件ICTbox
SOLIDWORKS多功能插件ICTbox 
智诚科技工业服务项目承接
智诚科技ICT专注机械设计、仿真分析、电气开发、PLM实施、二次开发,专业工程师团队外包落地,助力企业降本增效